





Physics Notes for Chapter 4 Laws of Motion Class 11 - FREE PDF Download
Vedantu Provides Class 11 Physics Laws Of Motion Notes according to the latest Class 11 Physics Syllabus which are essential for understanding how objects behave when forces act on them. In this chapter, Students will explore Newton’s three laws, which explain the relationship between force, mass, and acceleration. The notes cover key concepts such as inertia, momentum, action-reaction forces, and types of friction. Each concept is simplified for better understanding, helping you grasp the real-world applications of these laws, such as how vehicles move or how objects stay at rest. Class 11 Physics Notes PDFs are designed to make the learning process easier by providing clear explanations and practical examples. Perfect for exam preparation, they will help you quickly review the main points. Download the free PDF for easy access and study support.
 Table of Content
Table of ContentForce:
A force is something that causes a body's rest or motion to alter. An interaction between two bodies is also referred to as force. Two bodies exert forces on each other even if they are not physically in contact, e.g., the electrostatic force between two charges or gravitational force between any two bodies.
It is a vector quantity having SI unit Newton (N) and dimension \[\left[ {ML{T^{--2}}} \right]\].
Superposition of Force: When many forces are acting on a body then their resultant is obtained by the laws of vector addition:
$\overrightarrow {{F_{res.}}} = \overrightarrow {{F_1}} + \overrightarrow {{F_2}} + \overrightarrow {{F_3}} .............. + \overrightarrow {{F_n}}$
$\overrightarrow {{F_{res.}}} = \sqrt {{{\overrightarrow {{F_1}} }^2} + {{\overrightarrow {{F_2}} }^2} + 2{{\overrightarrow {{F_1}} }^{}}\overrightarrow {{F_2}} \cos {\theta ^{}}} $
$\tan \alpha = \dfrac{{{F_2}\sin \theta }}{{{F_1} + {F_2}\cos \theta }}$
The resultant of the two forces \[\overrightarrow {{F_1}} \] and \[\overrightarrow {{F_2}} \]acting at angle \[\theta \] is given by: \[\overrightarrow {{F_{res.}}} = \sqrt {{{\overrightarrow {{F_1}} }^2} + {{\overrightarrow {{F_2}} }^2} + 2{{\overrightarrow {{F_1}} }^{}}\overrightarrow {{F_2}} \cos {\theta ^{}}} \]
The resultant force is directed at an angle α with respect to force F1 where:
\[\tan \alpha = \dfrac{{{F_2}\sin \theta }}{{{F_1} + {F_2}\cos \theta }}\]
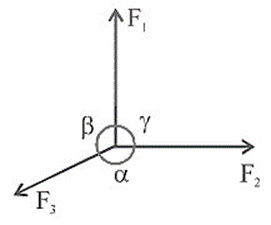
Lami’s Theorem:
If three forces F1 , F2 and F3 are acting simultaneously on a body and the body is in equilibrium, then according to Lami’s theorem:
\[\dfrac{{{{\text{F}}_1}}}{{\sin (\pi - \alpha )}} = \dfrac{{{{\text{F}}_2}}}{{\sin (\pi - \beta )}} = \dfrac{{{{\text{F}}_3}}}{{\sin (\pi - \gamma )}}\] where α, β & γ are the angles opposite to the forces F1 , F2 & F3 respectively.
Basic Forces:
There are basically four types of forces: Weight, Contact force, Tension and Spring Force.
Weight: It is the force with which the earth attracts a body toward itself. It is also called the gravitational force.
Contact Force: When two bodies come in contact, they exert forces on each other that are called contact forces.
Normal Force (N): This is the contact force component that is normal to the surface. It determines how tightly two surfaces are forced together.
Frictional Force (f): It is the component of contact force parallel to the surface. It opposes the relative motion (or attempted motion) of the two in-contact surfaces.
Tension: It refers to the force exerted by the end of a taut string, rope, or chain. The direction of strain is pulling the body, whereas the natural reaction is pushing it.
Spring Force: It is the resists to change its length; the more you alter its length the harder it resists. The force exerted by a spring is given by \[F{\text{ }} = {\text{ }}--k.x\], where x is the change in length and k is the spring constant (unit Nm-1)
Newton's Laws of Motion:
Newton's First Laws:
If a body is at rest or in motion in a straight line, it will remain at rest or in motion unless it is acted by any external force. This is known as the Law of Inertia or the First laws of Newton
Inertia is the property of the inability of a body to change its position of rest or uniform motion in a straight line unless some external force acts on it.
Newton’s first law is valid only in a frame of reference of the inertial frame, i.e., if a frame of reference is at rest or in uniform motion it is called inertial, otherwise non-inertial.
Newton's Second Laws:
According to the second law, the rate of change of momentum of a body is proportional to the resultant force acting on the body, i.e.,
$F \propto \dfrac{{dp}}{{dt}}$ or $F \propto ma$
$P = mv$
$\Rightarrow \dfrac{{dp}}{{dt}} = m\dfrac{{dv}}{{dt}}$.
The applied resultant force causes a change in momentum in the direction of the applied resultant force is a measure of the total amount of motion in the body.
\[\vec F=\dfrac {d{\vec v}}{dt}\]
\[\Rightarrow m {\vec a}=\dfrac {{\vec P_2}-{\vec P_1}}{t}\]
The external force acting on a body can accelerate it, either by changing the magnitude of velocity or direction of velocity or both.
Special Cases:
Case 1:
If the force is parallel or antiparallel to the motion of the body, then it changes only the magnitude of $\overrightarrow v $ but not the direction. Therefore, the path will be a straight line.
Case 2:
If the force is acting perpendicular to the motion of body, it changes only the direction but not the magnitude of $\overrightarrow v $. Therefore, the path will be Circular.
Case 3:
If the force acts at an angle θ to the motion of a body, it changes both the magnitude and direction of $\overrightarrow v $. In this case the path of the body may be elliptical, non-uniform circular, parabolic or hyperbolic.
Newtons Third Laws:
According to this laws, for every action, there is an equal and opposite reaction. E.g. when two bodies A and B exerts a force on each other i.e. ${F_A}$ & ${F_B}$. Then the force exerted by any of the bodies will be the same as the force exerted by another body but in the opposite direction. \[{{\text{F}}_{{\text{AB}}}} = - {{\text{F}}_{{\text{BA}}}}\]
The two forces involved in any interaction between two bodies are called action and reaction.
Linear Momentum:
It is defined as the product of the mass of the body and its velocity i.e.
Linear momentum = \[mass\:\times\:velocity\]
If a body of mass $m$ is moving with a velocity $v$ , its linear momentum $\overrightarrow P $is given by:
\[\overrightarrow P = m\overrightarrow v \]
It is a vector quantity and its direction is the same as the direction of the velocity of the body.
SI unit of linear momentum is \[kg{\text{ }}m{s^{--1}}\]and the cgs unit of linear momentum is \[g{\text{ }}cm{\text{ }}{s^{--1}}\].
Impulse:
The entire change in linear momentum is used to calculate the force's impulse, which is the product of the average force during impact and the duration of the impact created during the collision.
The force which acts on bodies for a short time is called impulsive forces. E.g. hitting a ball with a bat, firing a bullet with a gun etc.
An impulsive force does not remain constant instead, it varies from zero to maximum and then back to zero. Therefore, it is not possible to measure easily the value of impulsive force because it changes with time.
\[{\vec I} = {\vec F_{av}} \times {\text{t}} = {\vec p_2} -{\vec p_1}\]
Apparent Weight on a Body in a Lift
(a) When the lift is at rest, i.e. a=0:
\[mg - R = 0\]
\[\Rightarrow mg = R\]
\[R = mg(1 - \dfrac{a}{g})\]
\[{W_{app.}} = {W_o}(1 - \dfrac{a}{g})\]
\[R + mg - mg = 0\]
\[{F_{AB}}\times \Delta t = {f_{ms}} = {\mu _s}R\]
\[\angle AOC = \theta\]
\[{W_{app.}} = {W_o}\]
(b) When the lift moves upwards with an acceleration a:
\[R - mg - ma = 0\]
\[\Rightarrow R = m(g + a)\]
\[\Rightarrow R = mg(1 + \dfrac{a}{g})\]
\[{\therefore W_{app}} = {W_o}{\left ( 1 + \dfrac{a}{g} \right )}\]
(c) When the lift moves downwards with an acceleration a:
\[R + ma - mg = 0\]
\[\Rightarrow R = mg(1 - \dfrac{a}{g})\]
\[\therefore {W_{app}} = {W_o}(1 - \dfrac{a}{g})\]
(d) When the lift falls freely, i.e., a = g :
\[R + mg - mg = 0\]
\[\Rightarrow R\;=\;0\]
\[\therefore {W_{app}}\;=\;0\]
Principle of Conservation of Linear Momentum-
According to this principle, in an isolated system, the vector sum of all the system's linear momenta is conserved and is unaffected by their interactions reciprocal action and response.
Mutual forces between pairs of particles in an isolated system (i.e., a system with no external force) can thus produce changes in the linear momentum of individual particles. The linear momentum changes cancel in pairs, and the overall linear momentum remains unaltered because the mutual forces for each pair are equal and opposing. As a result, an isolated system of interacting particles' total linear momentum is conserved. This principle is a direct result of Newton's second and third laws of motion.
Consider an isolated system that consists of two bodies A and B with initial linear momenta \[{P_A}\] and \[{P_B}\]. Allow them to collide for a short time t before separating with linear momenta \[{P_{A}}'\] and \[{P_{B}}'\], respectively.
If \[{F_AB}\]is forced on A exerted by B, and \[{F_{BA}}\] is forced on B exerted by A, then according to the second law of newton:
\[{F_{AB}}\times \Delta t = \]Change in linear momentum of A = \[{\vec P_{A}}' - {\vec P_A}\]
\[{F_{BA}} \times \Delta t = \] Change in linear momentum of B= \[{\vec P_{B}}' - {\vec P_B}\]
Now, according to the third law of newton:
\[\Rightarrow {{\text{F}}_{{\text{AB}}}} = - {{\text{F}}_{{\text{BA}}}}\]
\[\therefore\:from\:equations\:we\:get\:\]
\[\Rightarrow {{\vec P_{A}}'-{\vec P_A}}\:=\:{{\vec P_{B}}'-{\vec P_B}}\]
or
\[\Rightarrow {{\vec P_{A}}'+{{\vec P_B}}'}={{\vec P_{A}}+{\vec P_{B}}}\]
which shows that the total final linear momentum of the isolated system is equal to its total initial linear momentum. This proves the principle of conservation of linear momentum.
Friction:
Friction is an opposing force that comes into play when one body actually moves (slides or rolls) or even tries to move over the surface of another body.
It is the force that comes into play when two surfaces come into contact with each other and oppose their relative motion.
I Frictional force is unaffected by the contact area. Because with an increase in the area of contact, the force of adhesion also increases.
When the surfaces in contact are extra smooth, the distance between the molecules of the surfaces in contact decreases, increasing the adhesive force between them. Therefore, the adhesive pressure increases, and so does the force of friction.
Types of Friction:
There are 3 types of friction: Static, Limiting and Kinetic Friction.
Static Friction- The opposing force that comes into play when one body tends to move over the surface of another body, but the actual motion has yet not started is called Static friction.
Limiting Friction- Limiting friction is the maximum opposing force that comes into play when one body is just on the verge of moving over the surface of the other body.
Kinetic Friction - Kinetic friction or dynamic friction is the opposing force that comes into play when one body is actually moving over the surface of another body.
Laws of Limiting Friction:
(i) Friction always works in the opposite direction of relative motion, making it a perverse force.
(ii) The maximum static friction force, FMS (also known as limiting friction), is proportional to the normal reaction (R) between the two in contact surfaces i.e.
\[{f_{ms}} \propto R\]
(iii) The limiting friction force is tangential to the interface between the two surfaces and is determined by the kind and state of polish of the two surfaces in contact.
(iv) As long as the normal reaction stays constant, the limiting friction force is independent of the area of the surfaces in contact.
Coefficient of Static Friction:
We know that,
\[{f_{ms}} \propto R\]
\[\Rightarrow {f_{ms}} = {\mu _s}R\]
Here, \[{\mu _s}\] is a constant of proportionality and is called the coefficient of static friction and its value depends upon the nature of the surfaces in contact and is usually less than unity i.e. 1 but never 0.
Since the force of static friction (fS) can have any value from zero to maximum (\[{f_{ms}}\] ), i.e. \[{f_s} \leqslant {f_{ms}}\],
Kinetic Friction:
The laws of kinetic friction are exactly the same as those for static friction. Accordingly, the force of kinetic friction is also directly proportional to the normal reaction:
\[{f_k} \propto R\]
\[\Rightarrow {f_k} = {\mu _k}R\]
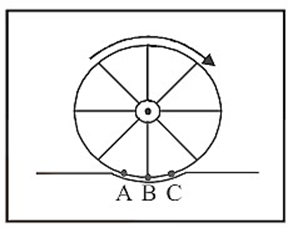
Rolling Friction:
The opposing force that comes into play when a body rolls over the surface of another body is called rolling friction.
Friction caused by rolling. Consider a wheel that is rolling down a street. As the wheel travels down the road, it presses against the road's surface and is compressed slightly as shown in Fig. :
Angle of Friction:
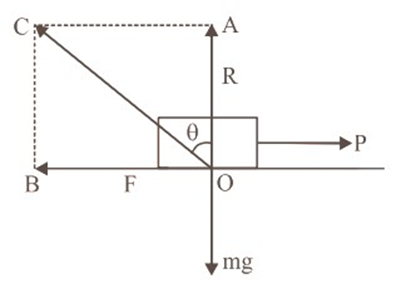
The angle of friction between any two surfaces in contact is defined as the angle formed by the resultant of the limiting friction force F and the normal reaction direction R. It is represented by θ.
In the given fig. OA represents the normal reaction R that balances the weight mg of the body. OB represent F, the limiting force of sliding friction, when the body tends to move to the right. Complete the parallelogram OACB. Join OC. This represents the resultant of R and F. By definition, \[\angle AOC = \theta \] is the angle of friction between the two bodies in contact.
The angle of friction is determined by the nature of the materials used on the surfaces in contact as well as the nature of the surfaces themselves.
Relation Between 𝛍 and 𝛉:
In $\Delta AOC$, $\tan \theta = \dfrac{{AC}}{{OA}} = \dfrac{{OB}}{{OA}} = \mu $$\tan \theta = \dfrac{{AC}}{{OA}} = \dfrac{{OB}}{{OA}} = \mu $
Hence, $\mu = \tan \theta $ ... (6)
(i.e.\[\mu\] is the coefficient of limiting friction)
Angle of Repose or Angle of Sliding:
The minimum angle of inclination of a plane with the horizontal at which a body placed on the plane begins to slide down is known as the angle of repose or angle of sliding.
Represented by α. Its value depends on the material and nature of the surfaces in contact.
In fig., AB is an inclined plane such that a body placed on it just begins to slide down. \[\angle BAC\:\alpha\]= angle of repose.
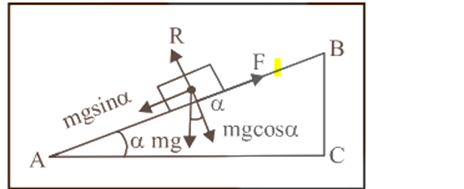
The various forces involved are :
weight, mg of the body,
normal reaction, R,
The force of friction F,
Now, mg can be resolved into two rectangular components: mg cosα
opposite to R and mg sinα opposite to F:
$F = mg\sin \alpha $ ... (7)
$R = mg\cos \alpha $ ... (8)
Diving these two eq. we get:
$\tan \alpha = \dfrac{F}{R}$
$\Rightarrow \tan \alpha = \mu $ ... (9)
Hence coefficient of limiting friction between any two surfaces in contact is equal to the tangent of the angle of repose between them.
From (6) and (9): $\mu = \tan \alpha = \tan \theta $
Therefore $\alpha = \theta $
i.e. (Angle of friction = Angle of repose)
Methods of Changing Friction:
Some of the ways of reducing friction are:
By polishing.
By lubrication.
By proper selection of materials.
By Streamlining.
By using ball bearings.
Dynamics of Uniform Circular Motion Concept of Centripetal Force:
The force required to move a body uniformly in a circle is known as centripetal force. This force acts along the circle's radius and towards the centre.
When a body moves in a circle, the direction of motion at any given time is along the tangent to the circle. According to Newton’s first law of motion, a body cannot change its direction of motion by itself an external force is needed. This external force is called the centripetal force.
An expression for centripetal force is:
\[F = m{v^2}/r = m{\omega ^2}r\]
\[R{\text{ }}--{\text{ }}mg{\text{ }} = {\text{ }}0{\text{ }}or{\text{ }}R{\text{ }} = {\text{ }}mg \]
\[F{\text{ }} = {\text{ }}{\mu _s}{\text{ }}R{\text{ }} = {\text{ }}{\mu _s}{\text{ }}mg{\text{ }} \]
\[R{\text{ }}cos\theta = {\text{ }}mg{\text{ }} + {\text{ }}F{\text{ }}sin\theta \]
\[From\:{\text{ }}\left( 3 \right),{\text{ }}R{\text{ }}\left( {cos\theta --{\text{ }}{\mu _s}{\text{ }}sin\theta } \right){\text{ }} = {\text{ }}mg \]
On account of a continuous change in the direction of motion of the body, there is a change in velocity of the body, and hence it undergoes an acceleration, called centripetal acceleration or radial acceleration.
Centrifugal Force:
Centrifugal force is a force that arises when a body is moving actually along a circular path, by virtue of the tendency of the body to regain its natural straight-line path.
When a body is moving in a straight line centripetal force is applied on the body, it is forced to move along a circle. The body has a natural inclination to return to its normal straight-line course while moving in a circle. This tendency gives rise to a force called centrifugal force.
The magnitude of centrifugal force = $m{v^2}/r$, which is the same as that of centripetal force, but opposite in direction i.e. The centrifugal force acts along the circle's radius, away from the centre.
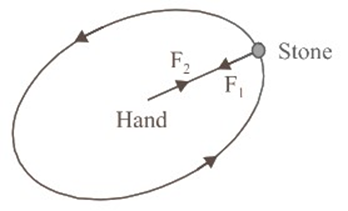
Note: Centripetal and Centrifugal forces, being the forces of action and reaction act always on different bodies. For when a piece of stone tied to one end of a string is rotated in a circle, centripetal force F1 is applied on the stone by the hand. Due to the stone's desire to revert to its natural straight-line route, centrifugal force F2 acts on it, pulling the hand outwards.. The centripetal and centrifugal forces are shown in Fig. :
Rounding A-Level Curved Road:
When a vehicle goes around a curved road, it requires some centripetal force. The vehicle's wheels have a tendency to depart the curved path and return to the straight-line path as it rounds the curve. The force of friction between the wheels and the road opposes this tendency of the wheels. This force (friction) therefore, acts, towards the centre of the circular track and provides the necessary centripetal force.
Three forces are acting on the car, fig.
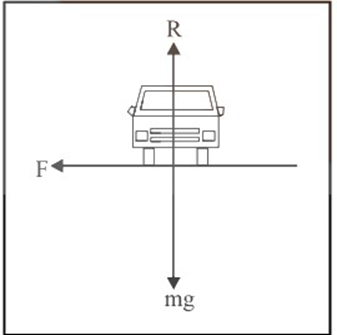
The weight of the car, mg, acting vertically downwards,
Normal reaction R of the road on the car, acting vertically upwards,
Frictional Force F, along the surface of the road, towards the centre of the turn.
As there is no acceleration in the vertical direction,
$R{\text{ }}--{\text{ }}mg{\text{ }} = {\text{ }}0{\text{ }}or{\text{ }}R{\text{ }} = {\text{ }}mg$ ...(1)
The centripetal force required for circular motion is applied along the road's surface, toward the turn's centre. As previously stated, static friction is what supplies the required centripetal force. Clearly $F \leqslant m{v^2}/r$ …(2)
where v is the velocity of the car and r is the radius of the curved path as,
$F{\text{ }} = {\text{ }}{\mu _s}{\text{ }}R{\text{ }} = {\text{ }}{\mu _s}{\text{ }}mg{\text{ }}$(${\mu _s}$ is coefficient of static friction between the tyres and the road)
Therefore from (2),
\[\dfrac{{{\text{m}}{{\text{v}}^2}}}{{\text{r}}} \leqslant {{\mu_s}mg}\]
or
\[v\:\leqslant\:\sqrt{{\mu_s}rg}\]
\[\therefore {\vec v_{max}}= \sqrt{{\mu_s}rg}\] ……(3)
Therefore, the maximum velocity with which a car can move without slipping is:
\[{\text{v}} = \sqrt {{\mu _{\text{s}}}{\text{rg}}} \]
Banking of Roads:
The phenomenon of raising the outer edge of the curved road above the inner edge is called the banking of roads.
The maximum permissible velocity with which a vehicle can go round a level curved road without skidding depends on μ (Coefficient of friction between the tyre and the road). As a result, the frictional force is not a reliable source of the required centripetal force for the vehicle.
In Fig., OX is a horizontal line. OA is the level of the banked curved road whose outer edge has been raised.
$\angle XOA{\text{ }} = \;\theta $= angle of banking.
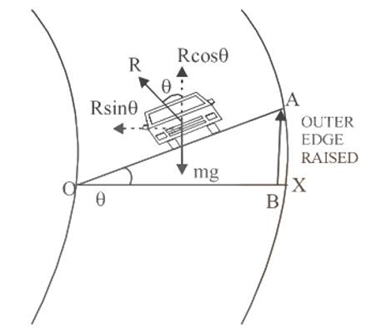
Forces are acting on the vehicle as shown in Fig:
Weight mg of the vehicle acting vertically downwards.
Normal reaction R of the banked road acting upwards in a direction perpendicular to OA.
The force of friction F between the banked road and the tyres, acting along with AO. R can be resolved into two rectangular components-
R cosθ, along a vertically upward direction
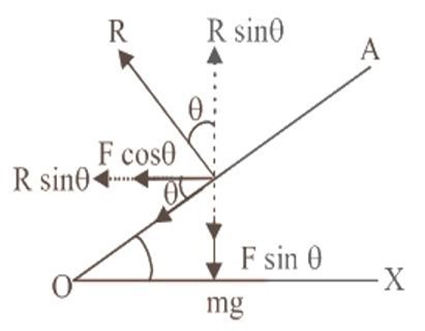
R sinθ, along the horizontal, towards the centre of the curved road. F can also be resolved into two rectangular components:
(i) F cosθ, along the horizontal, towards the centre of the curved road
(ii) F sinθ, along the vertically downward direction.
As there is no acceleration along the vertical direction, the net force along this direction must be zero. Therefore,
$R{\text{ }}cos\theta = {\text{ }}mg{\text{ }} + {\text{ }}F{\text{ }}sin\theta $ ……(1)
If v is the vehicle's velocity on a banked circular road with radius r, then centripetal force is =$m{v^2}/r$. This is provided by the horizontal components of R and F as shown in Fig.
Therefore, \[R\sin \theta + F\cos \theta = \dfrac{{{\text{m}}{{\text{v}}^2}}}{{\text{r}}}\] ...(2)
But F < ${\mu _s}$ R, where ${\mu _s}$ is the coefficient of static friction between the banked road and the tyres. To obtain ${v_{\max }}$, we put $F{\text{ }} = {\text{ }}{\mu _s}{\text{ }}R$ in (1) and (2)
\[{\text{R}}\cos \theta = {\text{mg}} + {\mu _{\text{s}}}{\text{R}}\sin \theta \] … (3)
And \[{\text{R}}\sin \theta + {\mu _{\text{s}}}{\text{R}}\cos \theta = \dfrac{{{\text{m}}{{\text{v}}^2}}}{{\text{r}}}\] …(4)
$From{\text{ }}\left( 3 \right),{\text{ }}R{\text{ }}\left( {cos\theta --{\text{ }}{\mu _s}{\text{ }}sin\theta } \right){\text{ }} = {\text{ }}mg$
\[{\text{R}} = \dfrac{{{\text{mg}}}}{{\cos \theta - {\mu _{\text{s}}}\sin \theta }}\] …(5)
From (4), $\quad {\text{R}}\left( {\sin \theta + {\mu _{\text{s}}}\cos \theta } \right) = \dfrac{{{\text{m}}{{\text{v}}^2}}}{{\text{r}}}$
$\operatorname{Using} (5),\dfrac{{\operatorname{mg} \left( {\sin \theta + {\mu _{\text{s}}}\cos \theta } \right)}}{{\left( {\cos \theta - {\mu _{\text{s}}}\sin \theta } \right)}} = \dfrac{{{\text{m}}{{\text{v}}^2}}}{{\text{r}}}$
$\therefore \quad {v^2} = \dfrac{{\operatorname{rg} \left( {\sin \theta + {\mu _{\text{s}}}\cos \theta } \right)}}{{\left( {\cos \theta - {\mu _{\text{s}}}\sin \theta } \right)}} = \dfrac{{\operatorname{rg} \cos \theta \left( {\tan \theta + {\mu _{\text{s}}}} \right)}}{{\cos \theta \left( {1 - {\mu _{\text{s}}}\tan \theta } \right)}}$
\[{\text{v}} = {\left[ {\dfrac{{rg\left( {{\mu _{\text{s}}} + \tan \theta } \right)}}{{\left( {1 - {\mu _{\text{s}}}\tan \theta } \right)}}} \right]^{1/2}}\] …(6)
Discussion:
If \[{\mu _s}\]= 0, i.e., if the banked road is perfectly smooth, then from eqn. (51), \[{v_o} = {(rg\tan \theta )^{\dfrac{1}{2}}}\]
Even when there is no friction, this is the speed at which a banked road may be rounded. On a banked road, driving at this speed causes essentially little wear and tear tyres.
\[{v_o}^2 = {\text{ }}rg{\text{ }}\tan \theta \]
\[\Rightarrow {\overrightarrow F _{real}} + {\overrightarrow F _{pseudo}} = {m_p}{a_{P,O}}\]
\[{\overrightarrow F _{real}} - {m_p}{\overrightarrow a _o} = {m_p}{\overrightarrow a _{P,O}}\]
If the speed of vehicle is less than \[{v_o}\] , frictional force will be up the slope. Therefore, the vehicle can be parked only if \[\tan \theta \leqslant {\mu _s}\].
The average speed of vehicles passing through a road is usually banked. However, if a vehicle's speed is slightly less or more than this, the self-adjusting static friction between the tyres and the road will operate, and the vehicle will not slide.
Note that curved railway tracks are also banked for the same reason. The level of the outer rail is raised a little above the level of the inner rail while laying a curved railway track.
Bending of a Cyclist:
When a cyclist turns, he must also exert centripetal force. His weight is balanced by the usual reaction of the ground if he keeps himself vertical while spinning. In that case, he must rely on the friction between the tyres and the road to generate the required centripetal force. Because the force of friction is modest and unpredictable, relying on it is risky.
In order to avoid relying on friction to generate centripetal power, the cyclist must bend slightly inwards from his vertical position while turning. A component of normal reaction in the horizontal direction produces the required centripetal force in this way.
To calculate the angle of bending with vertically, suppose
m = mass of the cyclist,
v = velocity of the cyclist while turning,
r = radius of the circular path,
\[\theta\] = angle of bending with the vertical
In the fig. shown below the weight of the cyclist(mg) acts vertically downwards at the centre of gravity C. R is the normal reaction on the cyclist. It acts at an angle \[\theta\] with the vertical.
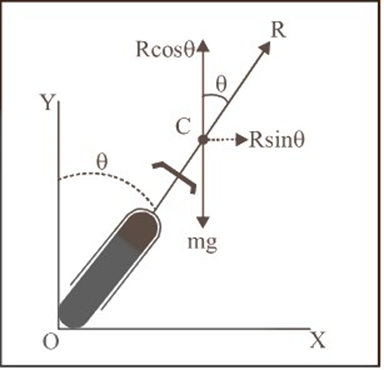
R can be resolved into two rectangular components: \[R\:\cos\theta\], along the vertically upward direction,\[R\:\sin\theta\], along the horizontal, towards the centre of the circular track.
In equilibrium, \[R{\text{ }}cos\theta = {\text{ }}mg\]\[R{\text{ }}cos\theta = {\text{ }}mg\] ….(1)
\[R{\text{ }}\sin \theta = {\text{ }}m{v^2}/r\] ….(2)
Dividing (2) by (1), we get, \[\tan \theta = {\text{ }}\dfrac{{{v_{}}^2}}{{rg}}\]
For a safe turn, θ should be small, for which v should be small and r should be large i.e. Turning should be done slowly and on a greater radius track. This means a safe turn should neither be fast nor sharp.
Pseudo Force:
\[{\overrightarrow F _{pseudo}} = - {m_p}{\overrightarrow a _0}\]If observer O is non-inertial and still wants to apply Newton's Second Law on particle P, the observer must add a "Pseudo force" to the real forces on particle P.
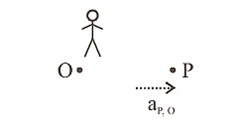
\[{\overrightarrow F _{real}} + {\overrightarrow F _{pseudo}} = {m_p}{a_{P,O}}\]
i.e \[{\overrightarrow F _{real}} - {m_p}{\overrightarrow a _o} = {m_p}{\overrightarrow a _{P,O}}\]
Where \[{\overrightarrow a _{P,O}}\] is the acceleration of P with respect to observer O.
Laws of Motion Class 11 Notes - Free PDF Download
Free Laws of Motion Class 11 NCERT notes PDF is available online to prepare well for their exams. Different teachers have prepared this PDF with years of experience and prepared different questions after learning the CBSE question paper. These notes are significantly helpful to the students as questions are prepared with appropriate answers to different levels of questions.
Physics Class 11 Chapter 4 notes are easy to read and cover all questions asked in the exams. Thus it helps students to prepare well before their final board class. All the answers are described in a precise manner such that students need not refer anywhere else for the same. According to the marks assigned, the concepts are quickly clarified, and students become aware of answering a particular question.
What Topics are Covered With Ch 4 Physics Class 11 Notes?
NCERT covers the entire syllabus as preferred by the CBSE board. Thus notes of Laws of Motion Class 11 are well prepared according to the question paper pattern designed by CBSE. These notes aid students in preparation and hence reduce the stress that comes during a hectic study schedule. These revision notes are best for self-study. Experienced teachers have prepared them according to the requirement. Below are the topics covered in physics Chapter 4 Class 11 notes:
The chapter begins with stating Dynamics, which is the study of forces and motions.
Then the first definition is covered: how to define forces?
The next concept is regarding Inertia along with its three different states.
Finally, it covers the definition of three different laws of motion along with the subtopics to prove these laws in detail. Numerical problems are also covered under this concept.
Now let us study each concept that is covered in Class 11 physics ch 4 notes.
Dynamics
Dynamics is defined as the term in physics, which deals with the study and knowledge about motion forces and laws.
Inertia
What is Inertia? Also, Describe Its Three Different States.
If an object moves in a straight line or is at rest or in a uniform motion, it cannot change its state to another until compelled. This property is known as inertia. It is measured according to the mass of a body.
There Are Three Different Types of Inertia
Inertia of motion
Inertia of rest
Inertia of direction
Force
Class 11 physics laws of motion notes also cover a basic definition of force and its interaction with different objects. Force is the basic pull and pushes applied to an object, whether the object is at rest or moving. We can also say that it is an interaction of one object with another, due to which an object changes its state.
On general terms, there are two different types of forces:
Constant Force
Action Force
Newton’s Laws of Motion
Newton has given three different laws of motion along with the proof to each law.
Newton’s First Law of Motion: Until you apply any external force to an object, the object will not change its state. It is basically if an object is at rest or moving uniformly in a straight line.
Also, this definition is called the Law of Inertia.
Newton’s Second Law of Motion: The net force is equivalent to the magnitude of the net force along with the direction of the applied net force.
Also, many define the second law of motion as the force directly proportional to acceleration produced while moving and the mass of the body.
\[\vec{F} = K \frac{d\bar{p}}{dt} = Km\vec{a}\]
Suppose F is the net force and m is the mass of the body, and a is the acceleration then Force is defined by the expression given above. Here, k is the constant of proportionality.
Newton’s Third Law of Motion: It is defined that if we apply a force to an object, we will experience an equal force in the opposite direction applied by the object on us.
This Law Deals With Some Other Basic Subtopics Like
Linear Momentum
Impulse
Law of Conservation of Momentum
Concurrent forces and Equilibrium
Tension
Notes of Chapter 4 physics Class 11 will also cover the concept of the simple pulley, friction, actual and apparent weight, laws of friction, angle of friction, coefficient of friction, motion in a circle, and many other numerical problems associated with it.
Benefits for Taking Notes of Laws of Motions Class 11 CBSE Physics Chapter 4
The advantages of taking Laws of Motion Class 11 Notes CBSE Physics Chapter 4 in the form of a free PDF download aid students in effective learning, revision, and exam preparation, leading to improved performance in their academic journey.
Taking Laws of Motion Class 11 Notes CBSE Physics Chapter 4 in the form of a free PDF download offers several advantages to students:
Accessibility: The free PDF download of class 11 physics notes allows students to access the study material anytime, anywhere, using their preferred devices.
Comprehensive Coverage: The notes provide a concise yet comprehensive overview of the chapter, covering all the key concepts related to laws of motion.
Simplified Explanations: The notes offer simplified explanations and examples, making complex concepts easier to understand and retain.
Quick Revision: These notes serve as handy reference material for quick revision before exams, helping students recall important points and formulas.
Time-Saving: The PDF format allows students to save time in note-taking, enabling them to focus on understanding the concepts better.
Supplementary Practice: The notes often include practice questions and solutions, facilitating self-assessment and reinforcing learning.
Exam-Oriented: The notes are designed to align with the CBSE exam pattern, ensuring that students focus on topics that are relevant for the board exams.
Improved Organization: The PDF format offers an organized layout, enabling students to navigate through the notes and find specific topics easily.
Enhanced Learning: By referring to these notes, students can enhance their learning experience and perform better in exams.
Free of Cost: Accessing the notes for free eliminates any financial burden, making quality study material available to all students without any constraints.
Laws of Motion Class 11 Notes Physics - Basic Subjective Questions
Section-A (1 Mark Questions)
1. Name the factor on which the coefficient of friction depends.
Ans. The coefficient of friction will mainly depend upon two factors, they are as follows:
1. The materials of the surfaces in contact.
2. The characteristics of the surfaces.
2. What provides the centripetal force to a car taking a turn on a level road?
Ans. The frictional force between the tyres and the road provides centripetal force.
3. Why is it desired to hold a gun tight to one's shoulder when it is being fired?
Ans. As the gun recoils after shooting, it must be held softly on the shoulder. Here the gun and the shoulder are one mass system, due to this the backkick will be reduced. A gunman must keep his weapon securely against his shoulder when shooting.
4. Why does a swimmer push the water backwards?
Ans. From Newton's 3rd law of motion, we know that "when one body exerts a force on the other body, the first body experiences a force equivalent in magnitude in the opposite direction of the force exerted". As a result, to swim ahead, the swimmer pushes the water backwards with his hands.
5. Friction is a self-adjusting force. Justify.
Ans. Friction is a self-adjusting force that changes in magnitude from zero to maximum to limit friction.
6. A thief jumps from the roof of a house with a box of weight W on his head. What will be the weight of the box as experienced by the thief during the jump?
Ans. The thief is in free fall during the jump. Both he/she and the box will be weightless during that time. So, the weight of the box experienced by the thief during the jump will be zero. So, mathematically it can be written as the Weight of the box, W=m(g-a)=m(g-g)=0.
7. Action and reaction forces do not balance each other. Why?
Ans. Because a force of action and response always operates on two separate bodies, action and reaction do not balance each other.
8. If force is acting on a moving body perpendicular to the direction of motion, then what will be its effect on the speed and direction of the body?
Ans. When a force acts in a perpendicular direction on a moving body, the work done by the force is zero. Since W = F.S cosθ, where S = 90° and cos90° = 0, therefore W = 0.
As a result, the magnitude of the body's velocity (or speed) will remain unchanged. The direction of motion of the body, however, will be altered.
9. The two ends of the spring - balance is pulled each by a force of 10kg. wt. What will be the reading of the balance?
Ans. As the spring balancing is based on the tension in the spring, it reads weight. Now, if both ends are pulled by a 10kg weight, the tension is 10kg, and the reading will be 10kg.
10. A lift is accelerated upward. Will the apparent weight of a person inside the lift increase, decrease or remain the same relative to its real weight? If the lift is going at a uniform speed, then?
Ans. There will be an increase in perceived weight. The apparent weight will stay the same as the true weight if the lift moves at a constant pace.
Section-B (2 Marks Questions)
11. Give the magnitude and direction of the net force acting on
(a) A drop of rain falling down with constant speed.
(b) A kite skillfully held stationary in the sky.
Ans.
(a) As the raindrop is falling at a constant speed, so its acceleration will be 0. As the force acting on a particle is given by F = ma, the net force acting on the raindrop will be 0.
(b) As the kite is held stationary, so by Newton's first laws of motion, the algebraic sum of forces acting on the kite is zero.
12. Two blocks of masses m1 and m2 are connected by a light spring on a smooth horizontal surface. The two masses are pulled apart and then released. Prove that the ratio of their acceleration is inversely proportional to their masses.
Ans. Due to inertia, the mass of the two bodies tries to expand, and the acceleration will act in the opposite direction as it shrinks. So let us assume that the F1 and F2 are the forces acting in opposite directions due to masses m1 and m2.
Thus $F_{1}+F_{2}=0$
$m_{1}+a_{2}=m_{2}a_{2}=0$
$m_{1}+a_{1}=m_{2}a_{2}=0$
$m_{1}+a_{1}=m_{2}a_{2}$
$\dfrac{a_{1}}{a_{2}}=-\dfrac{m_{1}}{m_{2}}$
Hence the above is proved.
13. Force of 16 N and 12 N are acting on a mass of 200 kg in mutually perpendicular directions. Find the magnitude of the acceleration produced.
Ans. In the given question, we have the force of 16 N and 12 N and they are acting on a mass of 200 kg in mutually perpendicular directions. We need to find the magnitude of the acceleration produced.
$F=\sqrt{F_{1}^{2}+F_{2}^{2}+2F_{1}F_{2}\;cos\theta }$
Since the forces are in mutually perpendicular directions. Therefore, (θ = 90°). Hence, the force will become:
$F=\sqrt{F_{1}^{2}+F_{2}^{2}}$
Now substituting the values, we get
$F=\left ( \sqrt{(16)^{2}+(12)^{2}} \right )$
=20 N
Hence, the magnitude of the acceleration will be:
$a=\dfrac{F}{m}$
$=\dfrac{20}{200}$
$=0\cdot 1ms^{-2}$
14. An elevator weighs 3000 kg. What is its acceleration when the tension supporting the cable is 33000 N. Given that g = 9.8 ms−2.
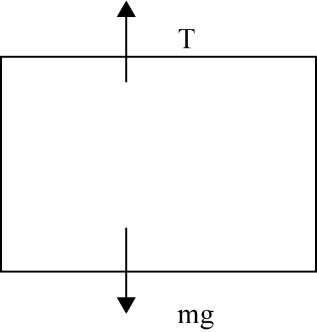
Ans. From the question, we have an elevator having the weighs given as 3000 kg. We need to find the acceleration, if the tension in the supporting cable is given as 33000 N.
Net upward force on the Elevator F is equal to $=T-ms(\vec{}F=ma)$
$\Rightarrow ma=T-mg$
$\Rightarrow T=m(a+g)$
$\Rightarrow T=33000N=3000(a+9\cdot 8)$
$a=\dfrac{33000-3000\times 9\cdot 8}{3000}$
$=1\cdot 2ms^{-2}$
15. How does the banking of roads reduce the wear and tear of the tyres?
Ans. When a curving road is unbanked, the centripetal force is provided by friction between the tyres and the road. Friction must be increased, resulting in wear and tear. When the curving road is banked, however, a component of the ground's natural response supplies the necessary centripetal force, reducing tyre wear and tear.
16. Two billiard balls each of mass 0.05 kg moving in opposite directions with speed 6 ms-1collide and rebound with the same speed. What is the impulse imparted to each ball due to the other?
Ans. As from the question, we have the mass of each ball given as 0.05 kg
The initial velocity of each ball will be = 6 ms-1
The magnitude of the initial momentum of each ball is given as, pi = 0.3 kg ms-1
The balls alter their directions of motion after colliding, but their velocity magnitudes do not change. Final momentum of each ball given as, $p_{f}=-0\cdot 3kg\;ms^{-1}$
Each ball's impulse equals a change in the system's momentum.
$=p_{f}-p_{i}$
$=0\cdot 3-0\cdot 3=-0\cdot 6\;kg\;ms^{-1}$
The negative indication implies that the balls are receiving opposite-direction shocks.
Important Topics of Class 11 Physics Chapter 4 Laws of Motion
Importance of Physics Class 11 Physics Chapter 4 Laws of Motion Revision Notes
The notes provide detailed explanations of key concepts, helping you understand complex ideas.
They include practical examples and illustrations to make abstract concepts more tangible.
The notes highlight important formulas and their applications, making problem-solving easier.
They offer practice questions and solutions, helping reinforce your understanding and test your knowledge.
The notes summarise important topics, making review sessions more efficient and effective.
They help in connecting theoretical concepts with real-world applications, aiding in better retention.
The notes are designed to be concise and focused, allowing for quick and easy review before exams.
Tips for Learning the Class 11 Chapter 4 Physics Laws of Motion
Understand Newton's Laws: Focus on grasping Newton's three laws of motion, which are crucial for this chapter. Use real-life examples to see how these laws apply to everyday situations.
Practice Problems: Work on a variety of problems, starting with basic ones and advancing to more complex scenarios. This helps build confidence and improves problem-solving skills.
Draw Free-Body Diagrams: Create diagrams to visualize the forces acting on objects. This aids in understanding how different forces interact and affect motion.
Memorise Formulas: Learn key formulas related to force, mass, acceleration, and friction. Practice applying these formulas to different problems to solidify your understanding.
Explain Concepts: Try explaining the concepts and laws to someone else or out loud. This helps reinforce your understanding and identify areas where you might need more review.
Create Summaries: Write concise summaries of the key concepts, laws, and formulas. Use these for quick revision, especially before exams.
Regular Review: Consistently review your notes and practice problems to keep the material fresh and enhance long-term retention.
Conclusion
The Laws of Motion Class 11 Notes CBSE Physics Chapter 4 in the form of a free PDF download offers a valuable resource to students pursuing physics. These comprehensive notes provide simplified explanations, examples, and practice questions, enhancing students' understanding and problem-solving skills related to motion. The convenience of accessing these notes as a PDF download allows for easy revision and quick reference during exam preparation. By utilising these notes, students can efficiently cover the entire chapter, reinforcing their conceptual knowledge and preparing effectively for assessments. The free availability of these notes ensures equitable access to quality study material, promoting a holistic learning experience for all students.
Related Study Materials for Class 12 Physics Chapter 4
Chapter-wise Links for Physics Notes For Class 11 PDF FREE Download
Related Study Materials Links for Class 11 Physics
Along with this, students can also download additional study materials provided by Vedantu for Physics Class 11–
FAQs on CBSE Notes Class 11 Physics Chapter 4 - Laws of Motion - 2026-27
1. What are the core concepts covered in Class 11 Physics Chapter 4, Laws of Motion, for a quick revision?
For a quick revision of Laws of Motion, you should focus on these core concepts:
- Newton's Three Laws of Motion: The law of inertia, the relation between force and acceleration (F=ma), and the action-reaction principle.
- Momentum and Impulse: Understanding linear momentum (p=mv) and how impulse causes a change in momentum.
- Conservation of Momentum: The principle that the total momentum of an isolated system remains constant.
- Friction: The types of friction (static, kinetic, rolling) and the factors affecting them.
- Circular Motion: The concepts of centripetal force required for circular motion and its applications like the banking of roads.
2. How can Newton's First Law of Motion be summarized for quick revision?
Newton's First Law, also known as the Law of Inertia, can be summarized as: an object will remain at rest or in a state of uniform motion in a straight line unless acted upon by an external, unbalanced force. In essence, objects resist changes in their state of motion. The more mass an object has, the greater its inertia.
3. What is the key difference between Newton's First and Second Laws?
The key difference is that Newton's First Law is qualitative, while the Second Law is quantitative.
- The First Law defines the concept of force as something that changes an object's state of motion and introduces the concept of inertia.
- The Second Law provides a way to measure this force by relating it to the mass of the object and the acceleration it produces (F = ma). It quantifies the relationship between force, mass, and acceleration.
4. Why do Newton's Third Law action-reaction pairs never cancel each other out?
Action-reaction forces never cancel each other out because they always act on two different bodies. For forces to cancel, they must act on the same object. For example, when you push a wall (action on the wall), the wall pushes you back (reaction on you). Since one force acts on the wall and the other acts on you, they cannot cancel; instead, they produce effects on their respective objects.
5. What is the relationship between impulse and momentum as per the impulse-momentum theorem?
The impulse-momentum theorem states that the impulse applied to an object is equal to the change in its linear momentum. Impulse is the product of the force and the time duration for which it acts. This is a crucial concept for understanding collisions and short-duration forces. The relationship is summarised as I = FΔt = Δp, where Δp is the change in momentum.
6. For revision, what is the main idea behind the Law of Conservation of Linear Momentum?
The main idea is that in any isolated system (a system where no net external force acts), the total linear momentum of the system remains constant. Even if particles within the system collide or exert forces on one another, the vector sum of their momenta before the interaction is equal to the vector sum of their momenta after the interaction. This principle is fundamental in analysing collisions, explosions, and recoil.
7. How do static, kinetic, and rolling friction differ from each other?
The key differences are based on the state of motion and magnitude:
- Static Friction (fₛ): This opposing force acts when an object is at rest and prevents it from moving. Its value adjusts itself to be equal to the applied force, up to a maximum limit called limiting friction.
- Kinetic Friction (fₖ): This force acts when an object is in sliding motion. It is generally less than the maximum static friction and remains relatively constant for a given speed.
- Rolling Friction (fᵣ): This force opposes the motion when an object rolls over a surface. It is significantly smaller than both static and kinetic friction, which is why wheels are used to move heavy objects.
Generally, fᵣ < fₖ < fₛ (max).
8. Why is friction called a 'self-adjusting force'?
Friction, specifically static friction, is called a self-adjusting force because its magnitude is not fixed. When you apply a small force to an object at rest, the static friction force matches your applied force exactly, keeping the object stationary. As you increase your push, the static friction also increases to match it, up to its maximum possible value, known as limiting friction. Only when the applied force exceeds this limit does the object start to move.
9. What is the practical difference between the angle of friction and the angle of repose?
While numerically equal, they describe different physical situations:
- The Angle of Friction (θ) is defined on a horizontal surface. It is the angle between the resultant of the normal reaction and the limiting friction force, and the normal reaction itself.
- The Angle of Repose (α) is defined for an inclined plane. It is the minimum angle of inclination of the plane with the horizontal at which a body placed on it just begins to slide down under its own weight.
For revision, remember that both are related to the coefficient of static friction by the formula μₛ = tan(θ) = tan(α).
10. What is the difference between centripetal and centrifugal force for a quick recap?
The primary difference is that centripetal force is a real force, while centrifugal force is a pseudo force (or fictitious force).
- Centripetal Force: This is the net force that acts towards the centre of a circular path, causing an object to deviate from a straight line and follow the curve. It is provided by a real source, like tension or gravity.
- Centrifugal Force: This is an apparent outward force experienced by an object in a rotating (non-inertial) frame of reference. It is not a real force but a consequence of the object's inertia.
11. Why is it safer for a cyclist to bend inwards while taking a turn?
It is safer for a cyclist to bend inwards because this action helps generate the necessary centripetal force to make the turn. By bending, a component of the normal reaction force from the ground is directed horizontally towards the centre of the curve. This provides the required centripetal force, reducing the reliance on the force of friction between the tyres and the road, which can be unreliable.
12. What is the purpose of 'banking of roads' and how does it help in turning?
The purpose of banking of roads is to provide a safer way for vehicles to take turns, especially at high speeds. By raising the outer edge of a curved road relative to the inner edge, the road surface is tilted. This inclination causes a component of the vehicle's normal reaction force to point towards the centre of the curve, supplying the necessary centripetal force. This reduces the vehicle's dependence on friction, preventing skidding and reducing wear on tyres.
13. How does the apparent weight of a person change in a lift accelerating upwards versus downwards?
The apparent weight of a person in a lift, measured by the normal reaction (R), changes with acceleration:
- Accelerating Upwards (a): The apparent weight increases. You feel heavier because the floor pushes up with more force. The formula is R = m(g + a).
- Accelerating Downwards (a): The apparent weight decreases. You feel lighter as the floor pushes with less force. The formula is R = m(g - a).
- Moving at Constant Velocity (a=0): The apparent weight is equal to the real weight (R = mg).
- In Free Fall (a=g): The apparent weight becomes zero (R = 0), leading to a state of weightlessness.