








Important Concepts in Rotational Motion for NEET Examinations
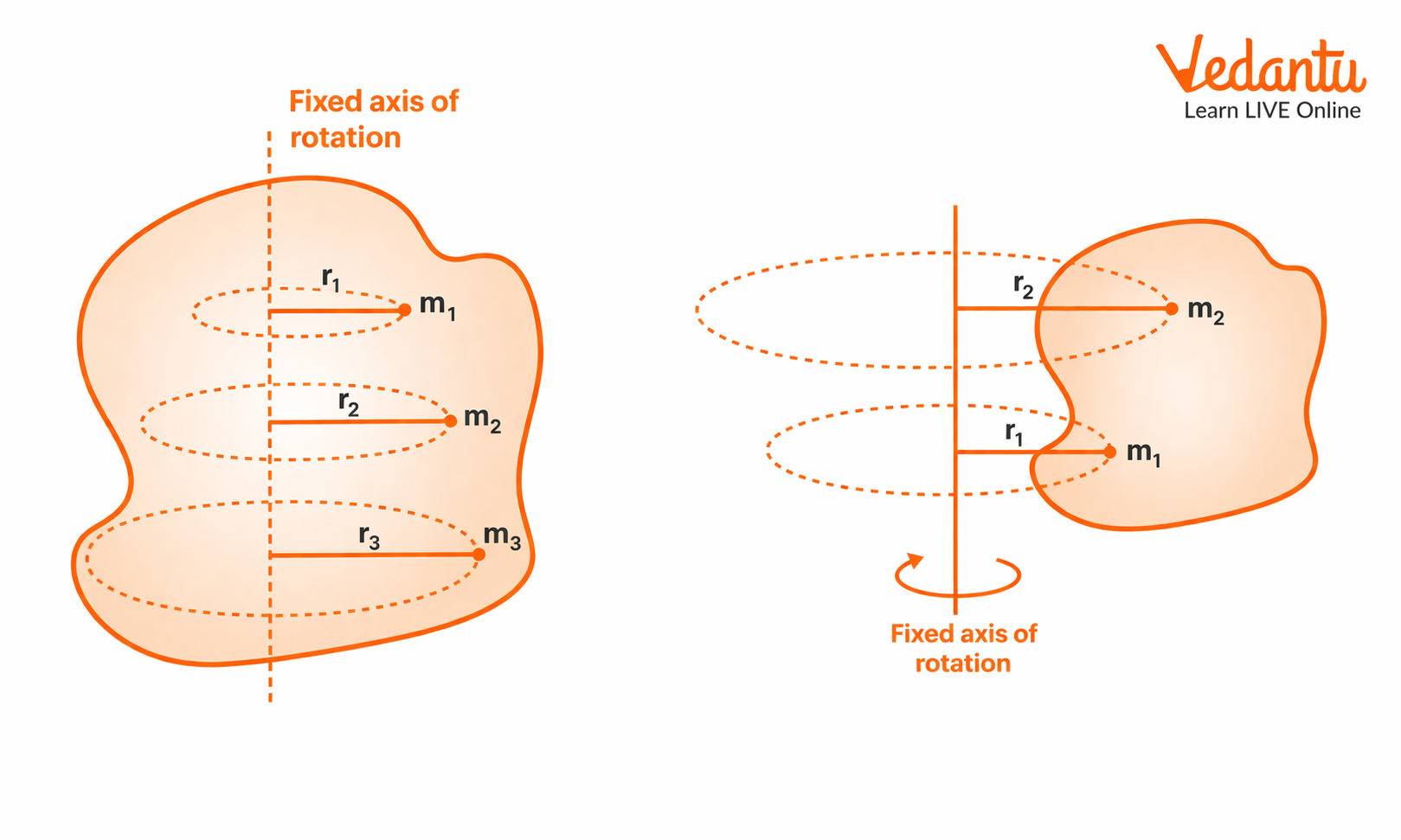
Rotational motion is the motion of a body about a fixed axis or point such that different particles of the body move in circular paths around the axis. Unlike translational motion, every particle in a rotating rigid body does not have the same linear velocity, but all particles share the same angular displacement, angular velocity, and angular acceleration about the axis.
Rotational motion is seen in fans, wheels, gears, Earth’s rotation, and many sports movements.
Rigid Body and Axis of Rotation
A rigid body is an ideal body in which the distance between any two particles remains constant during motion. In rotational motion, such a body turns about an axis called the axis of rotation. If the axis remains fixed in space, the motion is called pure rotation about a fixed axis. Examples include a ceiling fan, a door rotating about hinges, and clock hands.
Basic Concepts of Rotational Motion
The angular counterparts of linear motion are central to rotational motion:
Linear distance corresponds to angular displacement.
Linear velocity corresponds to angular velocity.
Linear acceleration corresponds to angular acceleration.
Mass corresponds to the moment of inertia.
Force corresponds to torque.
Linear momentum corresponds to angular momentum.
This comparison is important because it helps students understand rotational motion using ideas they already know from straight-line motion.
Also Read: Kinematics Formulas and Kinematics MCQs
Comparison of Linear and Rotational Motion
Displacement in linear motion is replaced by angular displacement in rotational motion.
Velocity in linear motion is replaced by angular velocity.
Acceleration in linear motion is replaced by angular acceleration.
Mass in linear motion is replaced by moment of inertia in rotational motion.
Force in linear motion is replaced by torque.
Momentum in linear motion is replaced by angular momentum.
Newton’s second law in linear motion is F = ma, while in rotational motion it becomes torque = I alpha.
Kinetic energy in translational motion is 1/2 mv², while rotational kinetic energy is 1/2 I omega².
This side-by-side mapping is one of the easiest ways to revise the full chapter quickly before NEET.
Angular Displacement, Angular Velocity and Angular Acceleration
Angular displacement is the angle through which a body rotates about its axis.
Angular velocity is the rate of change of angular displacement with time.
Angular velocity = dθ/dt
Angular acceleration is the rate of change of angular velocity with time.
Angular acceleration = dω/dt
If angular acceleration is constant, then rotational motion follows equations similar to linear uniformly accelerated motion.
Rotational equations of motion:
ω = ω0 + αt
θ = ω0t + 1/2 αt²
ω² = ω0² + 2αθ
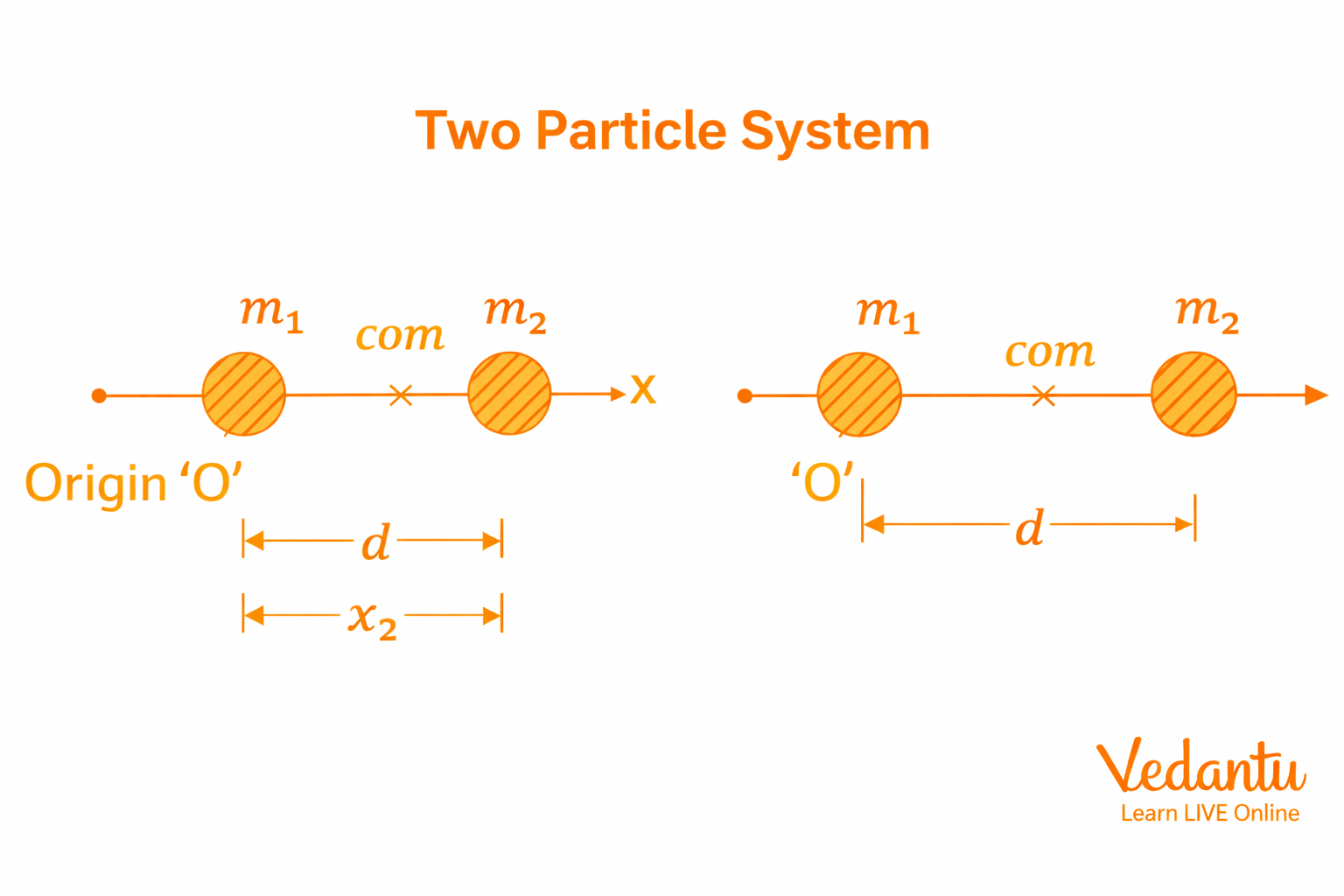
Centre of Mass of a Two-Particle System
The centre of mass is the point where the entire mass of a system may be considered concentrated for describing its translational motion. For two particles of masses m1 and m2 located at positions x1 and x2 on a line, the centre of mass is
Xcm = (m1x1 + m2x2) / (m1 + m2)
This result is very important in binary systems, collision problems, and rotational dynamics.
Centre of Mass of a Rigid Body
For a rigid body, the centre of mass is the fixed point where the total mass of the body may be assumed to act for translational analysis. In a symmetric uniform body, the centre of mass lies at the geometric centre. For example:
A uniform rod: centre of mass at its midpoint
A ring or disc: centre at the geometric centre
A sphere: centre at its geometric centre
In rotational motion, the centre of mass becomes especially important in rolling, combined translation and rotation, and angular momentum calculations about external points.
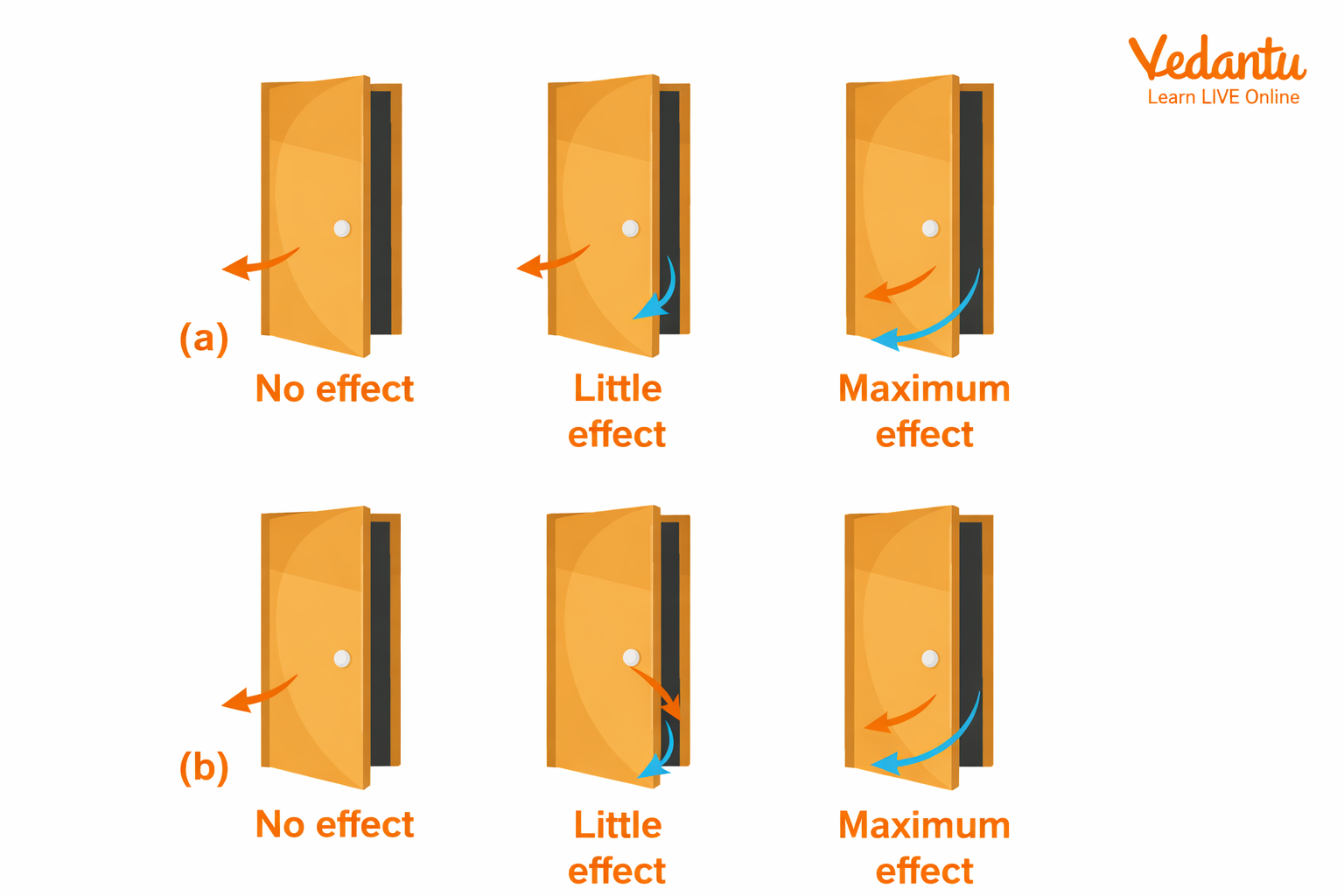
Moment of a Force and Torque
The turning effect of a force about an axis or pivot is called the moment of force or torque. It depends on both the magnitude of force and the perpendicular distance of the line of action of the force from the axis.
Torque = r × F
Magnitude of torque:
τ = rF sinθ
Here r is the position vector from the axis to the point of application of force, and θ is the angle between r and F. Torque is maximum when the force acts perpendicular to the lever arm. This is why a door opens more easily when pushed at the handle and not near the hinges.
SI Unit and Direction of Torque
The SI unit of torque is newton metre. Its direction is given by the right-hand rule. Curl the fingers of the right hand from r to F; the thumb points in the direction of torque. The same direction rule is later used in angular momentum as well.
Newton’s Second Law of Rotation
The rotational form of Newton’s second law states that the net external torque acting on a rigid body is equal to the product of its moment of inertia and angular acceleration.
τ = Iα
This equation plays the same role in rotational motion as F = ma does in linear motion.
Moment of Inertia
Moment of inertia is the rotational analogue of mass. It measures how strongly a body resists angular acceleration about a given axis. It depends on both the mass of the body and how that mass is distributed with respect to the axis.
For a system of particles:
I = Σ mi ri²
For a continuous body:
I = ∫ r² dm
Physical Meaning of Moment of Inertia
A larger moment of inertia means the body is harder to rotate or stop from rotating about that axis. This is why a bicycle wheel is more stable than a solid disc of the same mass concentrated closer to the centre only in some practical settings, and why mass farther from the axis contributes more strongly to rotational resistance.
Radius of Gyration
The radius of gyration k of a body about a given axis is the distance from the axis at which if the whole mass of the body were concentrated, the moment of inertia would remain the same.
I = Mk²
Therefore,
k = √(I/M)
Radius of gyration gives a compact idea of how far the mass is effectively distributed from the axis.
Values of Moment of Inertia for Simple Geometrical Objects
Students should memorise these standard results for NEET:
Thin rod of length L about centre and perpendicular to rod:
I = ML²/12
Thin rod of length L about one end and perpendicular to rod:
I = ML²/3
Ring about its central axis:
I = MR²
Disc about its central axis:
I = MR²/2
Solid cylinder about its central axis:
I = MR²/2
Solid sphere about its diameter:
I = 2MR²/5
Hollow sphere about its diameter:
I = 2MR²/3
These values are among the most frequently tested direct-result formulas from rotational motion.
Parallel Axis Theorem
The moment of inertia of a body about any axis parallel to an axis through its centre of mass is
I = Icm + Md²
where d is the perpendicular distance between the two axes.
This theorem is used for shifting the axis from the centre of mass to an edge, tangent, or contact point. It is especially useful for rods, discs, and rolling bodies.
Perpendicular Axes Theorem
For a plane lamina, the moment of inertia about an axis perpendicular to the plane and passing through a point equals the sum of the moments of inertia about two mutually perpendicular axes in the plane through the same point.
Iz = Ix + Iy
This theorem is commonly used for discs, rings, and rectangular laminae.
Applications of Axis Theorems
Parallel axis theorem is used when:
you need the moment of inertia about an end instead of the centre
you need rolling-body kinetic energy using the point of contact
you need angular momentum about a point not at the centre of mass
Perpendicular axis theorem is used when:
the body is a flat lamina
you need the moment of inertia about the axis normal to the plane
you want to derive common results for discs and plates
Rotational Kinetic Energy
A rotating rigid body has kinetic energy because its different particles move with different linear speeds. The rotational kinetic energy is
K = 1/2 Iω²
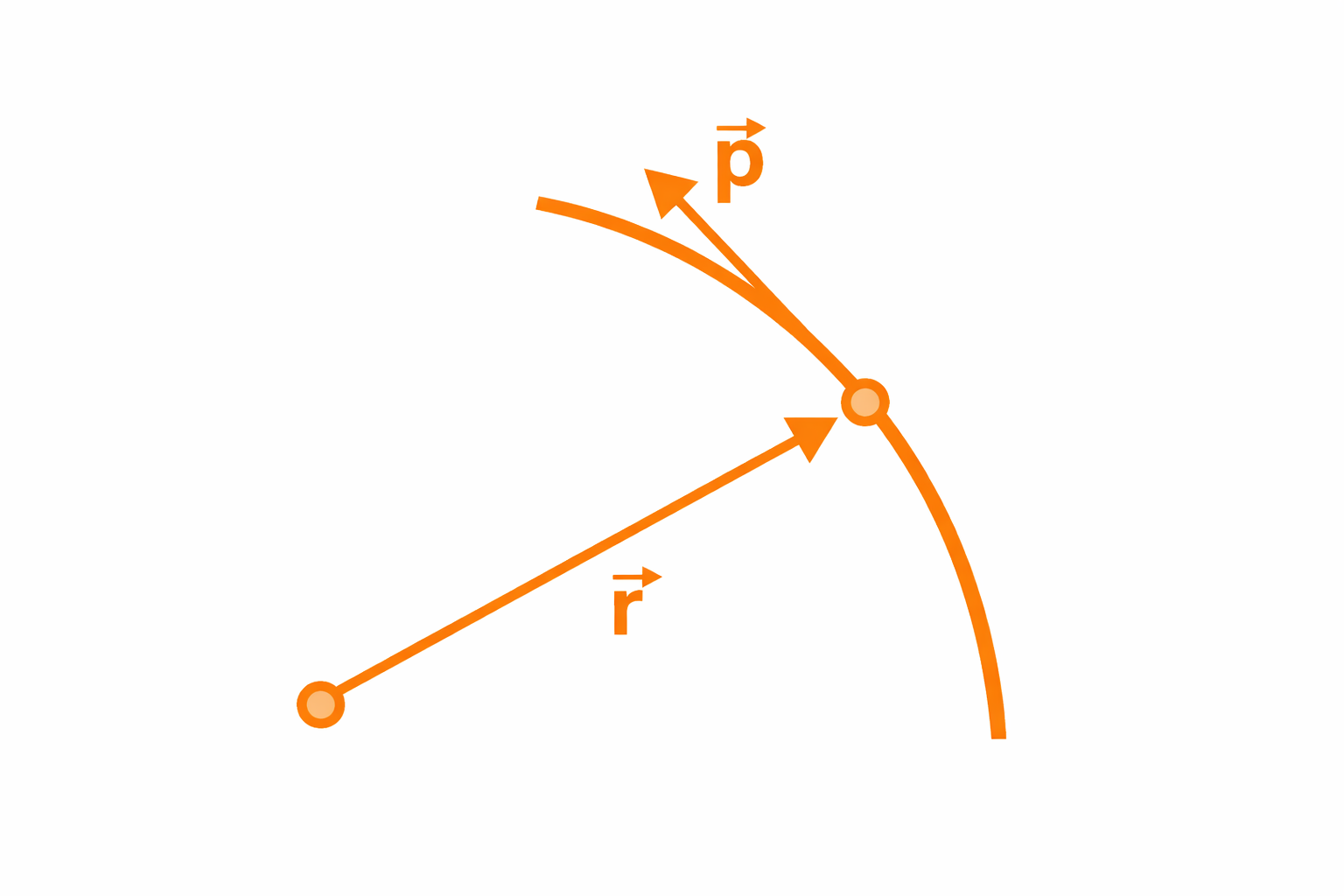
Angular Momentum
Angular momentum is the rotational analogue of linear momentum. For a particle about a point,
L = r × p
For a rigid body rotating about a fixed axis,
L = Iω
The direction of angular momentum is given by the right-hand rule.
Conservation of Angular Momentum
If the net external torque on a system is zero, the total angular momentum of the system remains constant.
If external torque = 0, then L = constant
This is the principle of conservation of angular momentum.
Applications of Conservation of Angular Momentum
A skater spins faster by pulling in the arms.
A diver rotates faster after tucking the body.
A planet moves faster near the Sun and slower when farther away.
A person on a rotating stool speeds up when bringing weights closer.
These are standard applications asked in conceptual NEET questions.
Equilibrium of Rigid Bodies
A rigid body is in equilibrium when both of these conditions are satisfied:
Net external force = 0
Net external torque = 0
The first ensures translational equilibrium.
The second ensures rotational equilibrium.
A body may have zero net force but still rotate if net torque is not zero.
Rotational Equilibrium
A body is in rotational equilibrium if the algebraic sum of torques acting on it is zero. In that case, angular acceleration is zero, so the body is either at rest or rotating with constant angular velocity.
Rigid Body Rotation and Equations of Rotational Motion
For rotation about a fixed axis with constant angular acceleration:
ω = ω0 + αt
θ = ω0t + 1/2 αt²
ω² = ω0² + 2αθ
These equations are directly analogous to the linear equations of motion and are extremely important in NEET numericals based on rotating wheels, pulleys, and fan blades.
Rolling Motion as Combined Translation and Rotation
Rolling motion is a combination of translational motion of the centre of mass and rotational motion about the centre of mass. For a body rolling without slipping:
v = Rω
a = Rα
Kinetic Energy of a Rolling Body
For a rolling body,
KE = 1/2 Mv² + 1/2 Icmω²
If rolling is pure and without slipping, then v = Rω, so the translational and rotational parts can be combined neatly.
Pure Rolling Condition
For pure rolling on a stationary surface:
v = Rω
a = Rα
If these conditions are not satisfied, slipping occurs.
Centre of Mass in Binary Systems
In a binary system, two bodies revolve about their common centre of mass under mutual attraction. If the distance between them is d, then their distances from the centre of mass are inversely proportional to their masses.
Most Important Formulas from Rotational Motion for NEET
Xcm = (m1x1 + m2x2) / (m1 + m2)
τ = rF sinθ
τ = Iα
I = Σmr²
I = Mk²
Krot = 1/2 Iω²
L = r × p
L = Iω
If external torque = 0, angular momentum is conserved
v = Rω
a = Rα
I = Icm + Md²
Iz = Ix + Iy
Why is Rotational Motion Important for NEET?
Rotational motion is one of the highest-value mechanics topics for NEET because it combines concepts from force, momentum, energy, centre of mass, and equilibrium. Questions are often asked from torque, moment of inertia, angular momentum, rolling, and comparison of linear and rotational quantities. A strong hold on this chapter also helps in gravitation, systems of particles, and rigid body equilibrium.
Most Important NEET 2026 Topics Physics
FAQs on Rotational Motion for NEET: Centre of Mass, Torque, Angular Momentum, Moment of Inertia and Equilibrium
1. What is meant by rotational motion?
Rotational motion is the motion of a body about a fixed axis or point, where every particle of the body moves in a circular path around that axis. In this type of motion, the distance of each particle from the axis remains constant.
2. What are 5 examples of rotational motion?
Common examples of rotational motion include:
Electric fan blades
Wind turbines
Potter’s wheel
Bicycle or car wheels
Earth rotating about its axis
3. What is called rotational?
The term rotational describes any motion, system, or physical situation in which an object turns or spins about a fixed axis or centre. In physics, it is mainly used for bodies undergoing rotational motion, such as wheels, discs, and fans.
4. What is the formula for rotational motion Class 11?
The main formulas used in rotational motion are:
Angular velocity:
ω = dθ/dt
Angular acceleration:
α = dω/dt
Equations of rotational motion:
ω = ω₀ + αt
θ = ω₀t + 1/2 αt²
ω² = ω₀² + 2αθ
Torque:
τ = Iα
Angular momentum:
L = Iω
Rotational kinetic energy:
K = 1/2 Iω²
These formulas are the rotational equivalents of the linear motion formulas studied earlier in mechanics.
5. Where is rotational motion used?
Rotational motion is used in many everyday and scientific applications. It is seen in vehicle wheels, electric motors, turbines, fans, washing machines, steering wheels, generators, propellers, and even in the rotation of planets. It is important in transport, machinery, household devices, sports, and astronomy.
6. What are the two types of rotational motion?
The two main types of rotational motion are:
Pure rotational motion:
The body rotates only about a fixed axis.
Combined translational and rotational motion:
The body moves forward while also rotating, such as a rolling wheel.
7. What are the 3 formulas of motion?
The three standard equations of motion are:
v = u + at
s = ut + 1/2 at²
v² = u² + 2as
These equations are used when an object moves with constant acceleration in a straight line.