


The rolling object rolls without slipping down an incline plane (angle of inclination \[\theta \]), then the minimum acceleration it can have is:
(A) \[g\sin \theta \]
(B) \[\dfrac{{2g\sin \theta }}{3}\]
(C) \[\dfrac{{g\sin \theta }}{2}\]
(D) zero
Answer
265.2k+ views
Hint: We will first apply Newton’s laws of motion to calculate acceleration on an inclined plane for pure rolling. We can also directly use the formula for acceleration: -
\[a = \dfrac{{g\sin \theta }}{{1 + \dfrac{I}{{m{R^2}}}}}\]
Where,
a = acceleration of the rolling body on the incline. (pure rolling)
\[\theta \] = inclination of the plane from horizontal.
g = acceleration due to gravity.
I = moment of inertia of the body about its centre of mass.
R = radius of the rolling body.
After calculating this acceleration, we will check for its minimum possible value.
Complete step by step solution
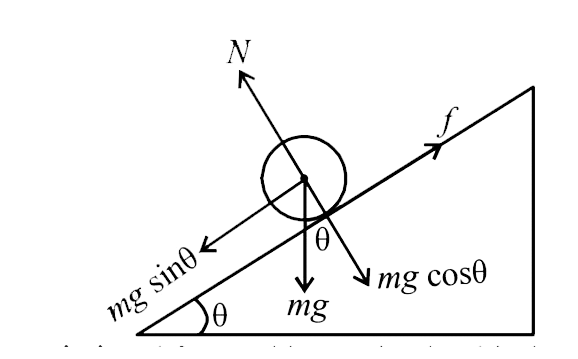
Figure 1/Pure Rolling on an inclined Plane
We will apply Newton’s Law of motion along the incline: -
\[\sum F = m\overrightarrow a \]
Where,
\[\sum F = \] Net Force acting on the body.
M = mass of the body.
a = acceleration of the body in the direction of force.
\[mg\sin \theta - f = ma\] . . . (1)
We will apply newton’s Law for rotational mechanics: -
\[\sum \tau = I\alpha \]
Where,
\[\sum \tau \] = Net Torque acting on the body.
I = Inertia of the body about centre of mass.
\[\alpha \] = Angular Acceleration of the body.
\[f \times R = I \times \dfrac{a}{R}\] (using \[a = \alpha R\] )
\[f = \dfrac{{Ia}}{{{R^2}}}\] . . . (2)
Adding (1) and (2) we get: -
\[mg\sin \theta = ma + \dfrac{{Ia}}{{{R^2}}}\]
\[g\sin \theta = a + \dfrac{{Ia}}{{m{R^2}}}\]
\[g\sin \theta = a(1 + \dfrac{I}{{m{R^2}}})\]
\[ \Rightarrow a = \dfrac{{g\sin \theta }}{{1 + \dfrac{I}{{m{R^2}}}}}\]
Now, in the above formula we see that acceleration will be minimum when the denominator = \[1 + \dfrac{I}{{m{R^2}}}\] will be maximum. The denominator will be maximum for the maximum value of I.
I have its maximum possible value for a ring which is ‘mR$^2$’. Thus, we take \[I = m{R^2}\] .
Now, acceleration becomes: -
\[a = \dfrac{{g\sin \theta }}{{1 + \dfrac{{m{R^2}}}{{m{R^2}}}}}\]
\[a = \dfrac{{g\sin \theta }}{{1 + 1}}\]
\[ \Rightarrow a = \dfrac{{g\sin \theta }}{2}\]
Hence, option(c) is correct.
Note
(A) In the above question, it is stated that the object rolls without slipping. This is the case for pure rolling. Hence, frictional force will be self-adjusting and not equal to maximum value of friction, that is, \[{\mu _s}N\] . Thus, do not keep f = \[{\mu _s}N\] in the above question to calculate acceleration using eq-(1).
(B) However, this is exactly what is done to calculate acceleration when the rolling motion is not pure. In that case, acceleration is given by the following equation: -
\[a = g\sin \theta - {\mu _k}\cos \theta \] (for impure rolling motion)
(C) Also, remember that the relation: - “ \[a = \alpha R\] ” is only valid in case of pure rolling motion and that is why we were able to use this relation in the above question.
\[a = \dfrac{{g\sin \theta }}{{1 + \dfrac{I}{{m{R^2}}}}}\]
Where,
a = acceleration of the rolling body on the incline. (pure rolling)
\[\theta \] = inclination of the plane from horizontal.
g = acceleration due to gravity.
I = moment of inertia of the body about its centre of mass.
R = radius of the rolling body.
After calculating this acceleration, we will check for its minimum possible value.
Complete step by step solution
Figure 1/Pure Rolling on an inclined Plane
We will apply Newton’s Law of motion along the incline: -
\[\sum F = m\overrightarrow a \]
Where,
\[\sum F = \] Net Force acting on the body.
M = mass of the body.
a = acceleration of the body in the direction of force.
\[mg\sin \theta - f = ma\] . . . (1)
We will apply newton’s Law for rotational mechanics: -
\[\sum \tau = I\alpha \]
Where,
\[\sum \tau \] = Net Torque acting on the body.
I = Inertia of the body about centre of mass.
\[\alpha \] = Angular Acceleration of the body.
\[f \times R = I \times \dfrac{a}{R}\] (using \[a = \alpha R\] )
\[f = \dfrac{{Ia}}{{{R^2}}}\] . . . (2)
Adding (1) and (2) we get: -
\[mg\sin \theta = ma + \dfrac{{Ia}}{{{R^2}}}\]
\[g\sin \theta = a + \dfrac{{Ia}}{{m{R^2}}}\]
\[g\sin \theta = a(1 + \dfrac{I}{{m{R^2}}})\]
\[ \Rightarrow a = \dfrac{{g\sin \theta }}{{1 + \dfrac{I}{{m{R^2}}}}}\]
Now, in the above formula we see that acceleration will be minimum when the denominator = \[1 + \dfrac{I}{{m{R^2}}}\] will be maximum. The denominator will be maximum for the maximum value of I.
I have its maximum possible value for a ring which is ‘mR$^2$’. Thus, we take \[I = m{R^2}\] .
Now, acceleration becomes: -
\[a = \dfrac{{g\sin \theta }}{{1 + \dfrac{{m{R^2}}}{{m{R^2}}}}}\]
\[a = \dfrac{{g\sin \theta }}{{1 + 1}}\]
\[ \Rightarrow a = \dfrac{{g\sin \theta }}{2}\]
Hence, option(c) is correct.
Note
(A) In the above question, it is stated that the object rolls without slipping. This is the case for pure rolling. Hence, frictional force will be self-adjusting and not equal to maximum value of friction, that is, \[{\mu _s}N\] . Thus, do not keep f = \[{\mu _s}N\] in the above question to calculate acceleration using eq-(1).
(B) However, this is exactly what is done to calculate acceleration when the rolling motion is not pure. In that case, acceleration is given by the following equation: -
\[a = g\sin \theta - {\mu _k}\cos \theta \] (for impure rolling motion)
(C) Also, remember that the relation: - “ \[a = \alpha R\] ” is only valid in case of pure rolling motion and that is why we were able to use this relation in the above question.
Recently Updated Pages
JEE Main Mock Test 2025-26: Principles Related To Practical
JEE Main 2025-26 Experimental Skills Mock Test – Free Practice
JEE Main 2025-26 Electronic Devices Mock Test: Free Practice Online
JEE Main 2025-26 Mock Tests: Free Practice Papers & Solutions
JEE Main 2025-26: Magnetic Effects of Current & Magnetism Mock Test
JEE Main Statistics and Probability Mock Test 2025-26
Trending doubts
JEE Main 2026: Exam Dates, Session 2 Updates, City Slip, Admit Card & Latest News
JEE Main Participating Colleges 2026 - A Complete List of Top Colleges
Hybridisation in Chemistry – Concept, Types & Applications
Understanding the Electric Field of a Uniformly Charged Ring
Derivation of Equation of Trajectory Explained for Students
Understanding Atomic Structure for Beginners
Other Pages
JEE Advanced 2026 Notification Out with Exam Date, Registration (Extended), Syllabus and More
JEE Advanced Percentile vs Marks 2026: JEE Main Cutoff, AIR & IIT Admission Guide
CBSE Notes Class 11 Physics Chapter 1 - Units And Measurements - 2025-26
JEE Advanced Marks vs Rank 2025 - Predict Your IIT Rank Based on Score
NCERT Solutions For Class 11 Physics Chapter 1 Units And Measurements - 2025-26
Important Questions For Class 11 Physics Chapter 1 Units and Measurement - 2025-26