








Step-by-Step Guide: Applying the Parallel Axis Theorem in Physics
Physics frequently deals with situations where objects rotate about an axis that passes through their centre of mass. It is usually simple to seek up the moment of inertia for the majority of objects of various forms when considering rotational motion about an object's centre of mass.
The moment of inertia is the lowest when the rotational axis is across the centre of mass. As the rotational axis's separation from the centre of mass widens, the moment of inertia grows.
The theorem makes it easy to connect any two parallel axes' moments of inertia by going through the centre of mass.
History of the Scientist/Theorem
The polymath Christiaan Huygens(14 April 1629 – 8 July 1695) first introduced the idea of the moment of inertia while researching a compound pendulum. Jakob Steiner(18 March 1796 – 1 April 1863) afterwards added his significant addition to this theorem. In honour of Christiaan Huygens and Jakob Steiner, the parallel axis theorem is frequently referred to as the Huygens-Steiner theorem.
Christiaan Huygens(14 April 1629 – 8 July 1695)
Parallel Axis Theorem Definition
According to the "Parallel Axis Theorem," a body's moment of inertia about any axis is equal to the product of that body's mass and the square root of the distance between the axes, as well as its moment of inertia about a parallel axis that passes through its centre of mass.
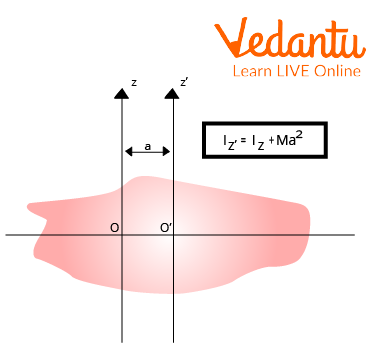
Parallel Axis Theorem
What is the Formula of the Theorem of Parallel Axis?
Mathematically the parallel axis theorem can be expressed as,
\[I = {I_0} + M{s^2}\]\[\]
Where,
I denote the body's moment of inertia concerning any axis.
Io denotes the body’s moment of inertia concerning the parallel axis through its centre of mass.
M denotes the mass of the body.
S denotes the distance between the two parallel axes.
Parallel Axis Theorem Proof
Consider two parallel axes, one of which, designated \[OY\], passes through the rigid body's centre of mass, and the other, designated \[{O_1}{Y_1}\], which is situated \[s\] distance away from \[OY\]. Let's take into account a small mass \[dm\] that is located \[R\]from the axis \[OY\] and \[{R_1}\]from the axis \[{O_1}{Y_1}\].
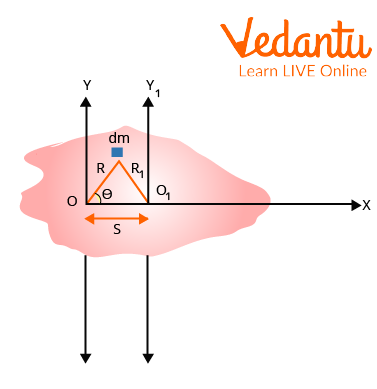
Parallel Axis Theorem Proof
The rigid body's total mass is \[M = \int {dm} \]. Therefore, the rigid body's moment of inertia about the axes \[OY\] and \[{O_1}{Y_1}\] is,
\[\begin{array}{l}I{}_0 = \int {{R^2}} dm{\rm{ and}}\\I = \int {{R_1}^2} dm\end{array}\]
The above figure allows us to write,
\[R_1^2 = {R^2} + {s^2} = 2sR\cos \theta \]
Therefore,
\[\begin{array}{l}I = {\int {{R_1}} ^2}dm\\I = \int {{R^2}} dm + \int {{s^2}} dm + \int {2sR} \cos \theta dm\end{array}\]
\[\begin{array}{l}I = {I_0} + M{s^2} + \int {2sR} \cos \theta dm\\{\rm{[}}{I_0} = \int {{R^2}} dm{\rm{ and }}\int {{s^2}} dm = M{s^2}{\rm{] }}\end{array}\]
In this case, \[R\cos \theta \] is the mass element's x-coordinate about the mass centre.\[\int {R\cos \theta } dm\], then, is the body's moment of mass concerning the axis of its centre of mass, \[OY\]. Since the body's centre of mass serves as the foundation for equilibrium,
\[\int {R\cos \theta } dm = 0\]
Therefore, the final equation will be as follows,
\[I = {I_0} + M{s^2}\]\[\]
Hence Proved.
Limitations of Parallel Axis Theorem
The usefulness of the parallel axis theorem is constrained.
The object's mass should be evenly distributed along the reference axis.
Application of Parallel AxisTheorem
The moment of inertia of a rigid body is determined using the parallel axis theorem in conjunction with any axis.
Any object in rotation can have its moment of inertia determined using the parallel axis theorem.
Solved Examples
1. If a body has a moment of inertia of 30 kgm2 along an axis perpendicular to its centre of gravity and a mass of 50kg. What is that body's moment of inertia along a different axis that is parallel to and 50cm distant from the current axis?
Ans: Given data:
\[\begin{array}{l}{I_0} = 30kg{m^2}\\M = 50kg\\s = 20cm = 0.2m\end{array}\]
We have the formula,
\[I = {I_0} + M{s^2}\]\[\]
Replace every known value in the formula above.
\[\begin{array}{l}I = 30 + 50 \times {(0.2)^2}\\ \Rightarrow I = 30 + 2\\ \Rightarrow I = 32kg{m^2}\end{array}\]
2. How much inertia does a stick with a mass of 100 g, and a length of 10 cm have?
Ans. Given data:
\[\begin{array}{l}M = 50g = 0.05kg\\s = 20cm = 0.2m\end{array}\]
The general formula for the moment of inertia of a rod with mass (M) and length (L) and an axis that passes through the rod's centre is;
\[I = (\frac{1}{{12}})M{s^2}\]
Therefore,
\[\begin{array}{l}I = \frac{1}{{12}} \times 0.05 \times 0.2\\I = 0.000833Kg{m^2}\end{array}\]
3. Find the moment of inertia of a solid sphere with a mass of 30kg and a radius of 2m around an axis that is 5m distant from the surface using the parallel axis theorem.
Ans. Given data:
\[\begin{array}{l}M = 30Kg\\R = 2m\\s = 5m\end{array}\]
The moment of inertia of a solid sphere with mass m and radius R about an axis that goes through its centre is \[{I_0} = \frac{2}{5}m{R^2}\].
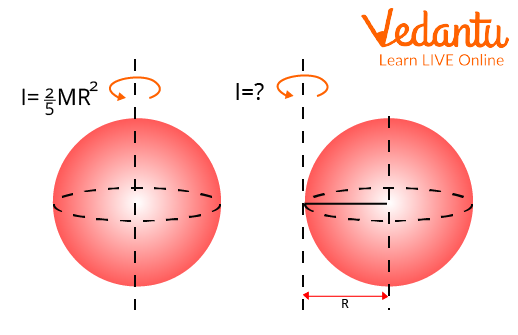
Solid Sphere
Therefore by the parallel axis theorem,
\[I = {I_0} + M{s^2}\]\[\]
Replace every known value in the formula above.
\[\begin{array}{l}I = \frac{2}{5}(30){(2)^2} + 30 \times {(5)^2}\\ \Rightarrow I = 48 + 750\\ \Rightarrow I = 798kg{m^2}\end{array}\]
Important Points to Remember
To apply the parallel axis theorem, the following considerations must be made.
Considered axis A and B must be parallel.
The axis B must go through the body's centre of mass, and
The distance between them must be the shortest possible.
Important Formulas to Remember From Theorem
The general formula for the Parallel axis theorem with mass (M) and distance(s),
\[I = {I_0} + M{s^2}\]\[\]
The general formula for the moment of inertia of a rod with mass (M) and length (L) and an axis that passes through the rod's centre is;
\[I = (\frac{1}{{12}})M{s^2}\]
Conclusion
The parallel axis theorem implies the sum of the moment of inertia through the mass centre and the product of the mass and square of the angle perpendicular to the rotational axis. The moments of inertia about various axes are connected by this theorem. But the usefulness of this theory is limited, though. For instance, the reference axis in the parallel axis theorem should pass through the object's centre of mass.
FAQs on Parallel Axis Theorem Explained for Students
1. What is the statement and formula for the Parallel Axis Theorem?
The Parallel Axis Theorem states that the moment of inertia of a rigid body about any axis is equal to the sum of its moment of inertia about a parallel axis passing through its centre of mass and the product of the body's mass and the square of the perpendicular distance between the two parallel axes. The formula is expressed as:
I = Icm + Md2
- I is the moment of inertia about the new, parallel axis.
- Icm is the moment of inertia about the axis passing through the centre of mass.
- M is the total mass of the body.
- d is the perpendicular distance between the two parallel axes.
2. How can you use the Parallel Axis Theorem to find the moment of inertia of a rod about one end?
This is a classic example of applying the theorem. For a thin uniform rod of mass M and length L, the moment of inertia about an axis passing through its centre of mass (Icm) is ML2/12. To find the moment of inertia about an axis at one of its ends (Iend), we can use the Parallel Axis Theorem.
- The centre of mass is at the middle of the rod.
- The distance (d) from the centre of mass to the end of the rod is L/2.
- Applying the theorem: Iend = Icm + Md2
- Substituting the values: Iend = (ML2/12) + M(L/2)2 = ML2/12 + ML2/4 = ML2/3.
3. What is the key difference between the Parallel Axis Theorem and the Perpendicular Axis Theorem?
The primary difference lies in their applicability and the orientation of the axes involved. The Parallel Axis Theorem relates the moment of inertia about two parallel axes, one of which must pass through the centre of mass, and it is applicable to any rigid body (2D or 3D). In contrast, the Perpendicular Axis Theorem relates the moment of inertia about three mutually perpendicular axes that intersect at a single point, and it is only applicable to planar bodies (laminas or 2D objects).
4. What are the essential conditions for applying the Parallel Axis Theorem?
To correctly apply the Parallel Axis Theorem, two critical conditions must be met:
- One of the two axes of rotation must pass through the centre of mass of the body. You cannot use the theorem to relate the moments of inertia about any two random parallel axes.
- The two axes of rotation—the one through the centre of mass and the new axis—must be parallel to each other.
The theorem is universally applicable to both two-dimensional and three-dimensional rigid bodies as long as these conditions are satisfied.
5. Why is the Parallel Axis Theorem so important in physics and engineering?
The Parallel Axis Theorem is a powerful tool because it greatly simplifies the calculation of the moment of inertia. Instead of performing complex integration for every possible axis of rotation, engineers and physicists can:
- Use pre-calculated, standard moments of inertia for common shapes about their centre of mass (e.g., rod, sphere, disc).
- Easily determine the moment of inertia about any parallel axis by performing a simple calculation (Icm + Md2).
This is crucial in fields like mechanical engineering for designing rotating parts, structural analysis for understanding how beams and columns respond to forces, and astrophysics for modelling rotating celestial bodies.
6. How does the concept of the radius of gyration relate to the Parallel Axis Theorem?
The radius of gyration (k) is an alternative way to express the moment of inertia (I = Mk2). The Parallel Axis Theorem can also be written in terms of the radius of gyration. By substituting I = Mk2 and Icm = Mkcm2 into the theorem's formula, we get:
Mk2 = Mkcm2 + Md2
Dividing by the mass (M), we get a direct relationship between the radii of gyration:
k2 = kcm2 + d2
This shows that the square of the radius of gyration about any axis is the sum of the square of the radius of gyration about a parallel axis through the centre of mass and the square of the distance between the axes.