


The point \[\left( {4,1} \right)\] undergoes the following 3 transformations successively:
(i)Reflection about the line \[y = x\]
(ii)Translations through a distance of 2 units along the positive direction of \[x\] axis.
(iii)Rotation through an angle \[\dfrac{\pi }{4}\] about the origin in the anti-clockwise sense.
Then the final position of the point is given by:
A.\[\left( {\dfrac{1}{{\sqrt 2 }},\dfrac{7}{{\sqrt 2 }}} \right)\]
B.\[\left( { - \sqrt 2 ,7\sqrt 2 } \right)\]
C.\[\left( { - \dfrac{1}{{\sqrt 2 }},\dfrac{7}{{\sqrt 2 }}} \right)\]
D.\[\left( {\sqrt 2 ,7\sqrt 2 } \right)\]
Answer
584.1k+ views
Hint: We will find the image of the given point after reflection about the line \[y = x\]. We will then find the coordinates of the point after the translation of the image along the \[x\] axis. We will use the formula for the rotation of a point about the origin to find the final position of the point.
Complete step-by-step answer:
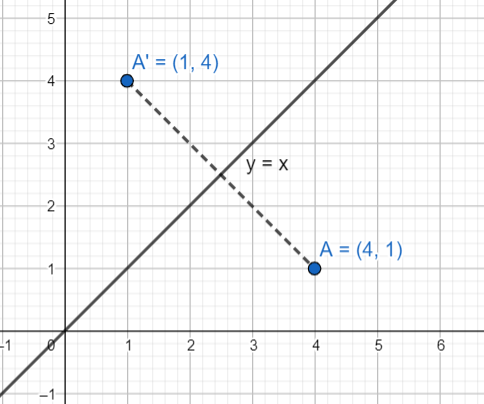
If any point (say \[\left( {a,b} \right)\]) is reflected about the line \[y = x\], then its image is the point \[\left( {b,a} \right)\]; that is the abscissa and the ordinate get interchanged.
So, the reflection of the point \[\left( {4,1} \right)\] about the line \[x = y\] will be the point \[\left( {1,4} \right)\].
Now, the point is translated through a distance of 2 units along the positive direction of the\[x\] axis.
So, the new point’s abscissa or the \[x\] coordinate will be 2 units more than the older abscissa. We will find the new point:
\[ \Rightarrow \left( {1 + 2,4} \right) = \left( {3,4} \right)\]
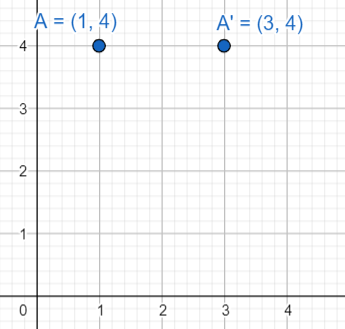
The new point will be \[\left( {3,4} \right)\].
Now, the point is rotated through an angle \[\dfrac{\pi }{4}\] about the origin in the anti-clockwise sense.
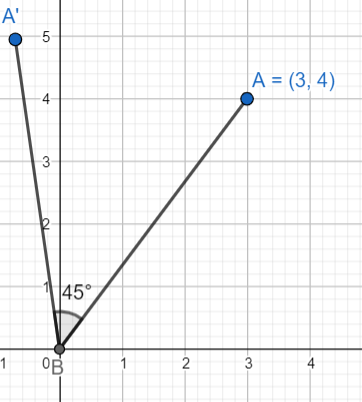
We will substitute \[45^\circ \] for \[\theta \], 3 for \[a\] and 4 for \[b\] in the formula for rotation of a point, \[\left( {a\cos \theta - b\sin \theta ,a\cos \theta + b\sin \theta } \right)\]. Therefore we get
\[\left( {a\cos \theta - b\sin \theta ,a\cos \theta + b\sin \theta } \right) = \left( {3\cos 45^\circ - 4\sin 45^\circ ,3\cos 45^\circ + 4\sin 45^\circ } \right)\]
Substituting the values of all trigonometric function, we get
\[\begin{array}{l} \Rightarrow \left( {3\cos 45^\circ - 4\sin 45^\circ ,3\cos 45^\circ + 4\sin 45^\circ } \right) = \left( {\dfrac{3}{{\sqrt 2 }} - \dfrac{4}{{\sqrt 2 }},\dfrac{3}{{\sqrt 2 }} + \dfrac{4}{{\sqrt 2 }}} \right)\\ \Rightarrow \left( {3\cos 45^\circ - 4\sin 45^\circ ,3\cos 45^\circ + 4\sin 45^\circ } \right) = \left( { - \dfrac{1}{{\sqrt 2 }},\dfrac{7}{{\sqrt 2 }}} \right)\end{array}\]
$\therefore $ The final position of the point is \[\left( { - \dfrac{1}{{\sqrt 2 }},\dfrac{7}{{\sqrt 2 }}} \right)\].
Option C is the correct option.
Note: If we get a case where the a point is rotated by an angle of \[\theta \] about the origin in the clockwise direction, we will substitute \[ - \theta \] in the formula instead of \[\theta \]. We can derive this formula using vector calculus and the Pythagoras theorem.
When a point (say \[\left( {a,b} \right)\]) is rotated by an angle \[\theta \] about the origin, then the coordinates of the new point are \[\left( {a\cos \theta - b\sin \theta ,a\cos \theta + b\sin \theta } \right)\].
Complete step-by-step answer:
If any point (say \[\left( {a,b} \right)\]) is reflected about the line \[y = x\], then its image is the point \[\left( {b,a} \right)\]; that is the abscissa and the ordinate get interchanged.
So, the reflection of the point \[\left( {4,1} \right)\] about the line \[x = y\] will be the point \[\left( {1,4} \right)\].
Now, the point is translated through a distance of 2 units along the positive direction of the\[x\] axis.
So, the new point’s abscissa or the \[x\] coordinate will be 2 units more than the older abscissa. We will find the new point:
\[ \Rightarrow \left( {1 + 2,4} \right) = \left( {3,4} \right)\]
The new point will be \[\left( {3,4} \right)\].
Now, the point is rotated through an angle \[\dfrac{\pi }{4}\] about the origin in the anti-clockwise sense.
We will substitute \[45^\circ \] for \[\theta \], 3 for \[a\] and 4 for \[b\] in the formula for rotation of a point, \[\left( {a\cos \theta - b\sin \theta ,a\cos \theta + b\sin \theta } \right)\]. Therefore we get
\[\left( {a\cos \theta - b\sin \theta ,a\cos \theta + b\sin \theta } \right) = \left( {3\cos 45^\circ - 4\sin 45^\circ ,3\cos 45^\circ + 4\sin 45^\circ } \right)\]
Substituting the values of all trigonometric function, we get
\[\begin{array}{l} \Rightarrow \left( {3\cos 45^\circ - 4\sin 45^\circ ,3\cos 45^\circ + 4\sin 45^\circ } \right) = \left( {\dfrac{3}{{\sqrt 2 }} - \dfrac{4}{{\sqrt 2 }},\dfrac{3}{{\sqrt 2 }} + \dfrac{4}{{\sqrt 2 }}} \right)\\ \Rightarrow \left( {3\cos 45^\circ - 4\sin 45^\circ ,3\cos 45^\circ + 4\sin 45^\circ } \right) = \left( { - \dfrac{1}{{\sqrt 2 }},\dfrac{7}{{\sqrt 2 }}} \right)\end{array}\]
$\therefore $ The final position of the point is \[\left( { - \dfrac{1}{{\sqrt 2 }},\dfrac{7}{{\sqrt 2 }}} \right)\].
Option C is the correct option.
Note: If we get a case where the a point is rotated by an angle of \[\theta \] about the origin in the clockwise direction, we will substitute \[ - \theta \] in the formula instead of \[\theta \]. We can derive this formula using vector calculus and the Pythagoras theorem.
When a point (say \[\left( {a,b} \right)\]) is rotated by an angle \[\theta \] about the origin, then the coordinates of the new point are \[\left( {a\cos \theta - b\sin \theta ,a\cos \theta + b\sin \theta } \right)\].
Recently Updated Pages
Master Class 11 Economics: Engaging Questions & Answers for Success
Master Class 11 English: Engaging Questions & Answers for Success
Master Class 11 Maths: Engaging Questions & Answers for Success
Class 11 Question and Answer - Your Ultimate Solutions Guide
Master Class 11 Social Science: Engaging Questions & Answers for Success
Master Class 11 Business Studies: Engaging Questions & Answers for Success
Trending doubts
One Metric ton is equal to kg A 10000 B 1000 C 100 class 11 physics CBSE
There are 720 permutations of the digits 1 2 3 4 5 class 11 maths CBSE
Differentiate between an exothermic and an endothermic class 11 chemistry CBSE
In what year Guru Nanak Dev ji was born A15 April 1469 class 11 social science CBSE
Difference Between Prokaryotic Cells and Eukaryotic Cells
State and prove Bernoullis theorem class 11 physics CBSE