


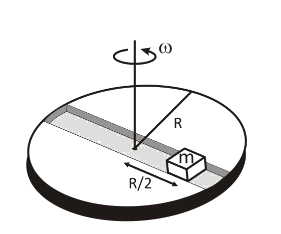
The distance \[r\] of the block at time \[t\] is:
A. \[\dfrac{R}{2}\cos 2\omega t\]
B. \[\dfrac{R}{2}\cos \omega t\]
C. \[\dfrac{R}{4}\left( {{e^{\omega t}} + {e^{ - \omega t}}} \right)\]
D. \[\dfrac{R}{4}\left( {{e^{2\omega t}} + {e^{ - 2\omega t}}} \right)\]
Answer
608.1k+ views
Hint:First of all, we will find out the expressions for the linear force and the angular force. We will equate them to obtain the expression of acceleration in differential form. After that we will integrate both the sides by taking limits from half the radius to the given distance. We will manipulate accordingly to obtain the result.
Complete step by step answer:
From the figure we know that, force on block along slot is, Where two forces are equal which is,
\[
m{\omega ^2}r = ma \\
\Rightarrow m{\omega ^2}r = m\left( {\dfrac{{vdv}}{{dr}}} \right) \\
\],
Where, \[a = r{\omega ^2}\] and \[v\dfrac{{dv}}{{dt}} = r{\omega ^2}\].
By integrating we get,
\[\int_0^v {vdv} = \int_{R/2}^r {{\omega ^2}rdr} \] …… (1)
Here,
$\dfrac{{{v^2}}}{2} = \dfrac{{{\omega ^2}}}{2}\left( {{r^2} - \dfrac{{{R^2}}}{4}} \right) \\
\Rightarrow v = \omega \sqrt {{r^2} - \dfrac{{{R^2}}}{4}} = \dfrac{{dr}}{{dt}} \\$
Putting value of \[v\]in equation 1 we get,
$ \int_0^v {vdv} = \int_{R/2}^r {{\omega ^2}rdr} \\
\Rightarrow \int_{R/4}^r {\dfrac{{dr}}{{\sqrt {{r^2} - \dfrac{{{R^2}}}{4}} }}} = \int_0^t {\omega dt} \\
\Rightarrow \ln \left( {\dfrac{{r + \sqrt {{r^2} - \dfrac{{{R^2}}}{4}} }}{{\dfrac{R}{2}}}} \right) - \ln \left( {\dfrac{{R/2 + \sqrt {\dfrac{{{R^2}}}{4} - \dfrac{{{R^2}}}{4}} }}{{\dfrac{R}{2}}}} \right) = \omega t \\
\Rightarrow r + \sqrt {{r^2} - \dfrac{{{R^2}}}{4}} = \dfrac{R}{2}{e^{\omega t}} \\
\Rightarrow {r^2} - \dfrac{{{R^2}}}{4} = \dfrac{{{R^2}}}{4}{e^{\omega t}} + {r^2} - 2r\dfrac{R}{2}{e^{\omega t}} \\
\therefore r = \dfrac{R}{4}\left( {{e^{\omega t}} + {e^{ - \omega t}}} \right) $
Hence, the required answer is \[\dfrac{R}{4}\left( {{e^{\omega t}} + {e^{ - \omega t}}} \right)\] .
The correct option is C.
Additional information:
Non-inertial reference frame: A non-inertial frame of reference is a frame of reference that is being accelerated in comparison to an inertial frame. In general, an accelerometer at rest in a non-inertial frame can detect an acceleration that is non-zero. Although the laws of motion are the same in all inertial frames, depending on the acceleration, they differ from frame to frame in non-inertial frames. The curvature of space-time in the theory of general relativity allows frames to be locally inertial, but globally non-inertial. There are no global inertial reference frames in general relativity due to the non-Euclidean geometry of curved space-time. More precisely, the force of gravity is the fictitious force appearing in general relativity.
Note:Remember that, we may now describe a non-inertial frame as a frame that is accelerated with regard to the assumed reference inertial frame. Under these frames, Newton's law would not hold true. An inertial reference frame is either at rest or at a constant speed as it travels. Non-inertial reference frames: -a reference frame is a non-inertial reference frame that either accelerates in a linear fashion or rotates around any axis.
Complete step by step answer:
From the figure we know that, force on block along slot is, Where two forces are equal which is,
\[
m{\omega ^2}r = ma \\
\Rightarrow m{\omega ^2}r = m\left( {\dfrac{{vdv}}{{dr}}} \right) \\
\],
Where, \[a = r{\omega ^2}\] and \[v\dfrac{{dv}}{{dt}} = r{\omega ^2}\].
By integrating we get,
\[\int_0^v {vdv} = \int_{R/2}^r {{\omega ^2}rdr} \] …… (1)
Here,
$\dfrac{{{v^2}}}{2} = \dfrac{{{\omega ^2}}}{2}\left( {{r^2} - \dfrac{{{R^2}}}{4}} \right) \\
\Rightarrow v = \omega \sqrt {{r^2} - \dfrac{{{R^2}}}{4}} = \dfrac{{dr}}{{dt}} \\$
Putting value of \[v\]in equation 1 we get,
$ \int_0^v {vdv} = \int_{R/2}^r {{\omega ^2}rdr} \\
\Rightarrow \int_{R/4}^r {\dfrac{{dr}}{{\sqrt {{r^2} - \dfrac{{{R^2}}}{4}} }}} = \int_0^t {\omega dt} \\
\Rightarrow \ln \left( {\dfrac{{r + \sqrt {{r^2} - \dfrac{{{R^2}}}{4}} }}{{\dfrac{R}{2}}}} \right) - \ln \left( {\dfrac{{R/2 + \sqrt {\dfrac{{{R^2}}}{4} - \dfrac{{{R^2}}}{4}} }}{{\dfrac{R}{2}}}} \right) = \omega t \\
\Rightarrow r + \sqrt {{r^2} - \dfrac{{{R^2}}}{4}} = \dfrac{R}{2}{e^{\omega t}} \\
\Rightarrow {r^2} - \dfrac{{{R^2}}}{4} = \dfrac{{{R^2}}}{4}{e^{\omega t}} + {r^2} - 2r\dfrac{R}{2}{e^{\omega t}} \\
\therefore r = \dfrac{R}{4}\left( {{e^{\omega t}} + {e^{ - \omega t}}} \right) $
Hence, the required answer is \[\dfrac{R}{4}\left( {{e^{\omega t}} + {e^{ - \omega t}}} \right)\] .
The correct option is C.
Additional information:
Non-inertial reference frame: A non-inertial frame of reference is a frame of reference that is being accelerated in comparison to an inertial frame. In general, an accelerometer at rest in a non-inertial frame can detect an acceleration that is non-zero. Although the laws of motion are the same in all inertial frames, depending on the acceleration, they differ from frame to frame in non-inertial frames. The curvature of space-time in the theory of general relativity allows frames to be locally inertial, but globally non-inertial. There are no global inertial reference frames in general relativity due to the non-Euclidean geometry of curved space-time. More precisely, the force of gravity is the fictitious force appearing in general relativity.
Note:Remember that, we may now describe a non-inertial frame as a frame that is accelerated with regard to the assumed reference inertial frame. Under these frames, Newton's law would not hold true. An inertial reference frame is either at rest or at a constant speed as it travels. Non-inertial reference frames: -a reference frame is a non-inertial reference frame that either accelerates in a linear fashion or rotates around any axis.
Recently Updated Pages
Master Class 11 English: Engaging Questions & Answers for Success
Master Class 11 Social Science: Engaging Questions & Answers for Success
Master Class 11 Maths: Engaging Questions & Answers for Success
Master Class 11 Biology: Engaging Questions & Answers for Success
Master Class 11 Physics: Engaging Questions & Answers for Success
Master Class 11 Chemistry: Engaging Questions & Answers for Success
Trending doubts
One Metric ton is equal to kg A 10000 B 1000 C 100 class 11 physics CBSE
What is cell theory Who formulated it class 11 biology CBSE
Phyllotaxy is the arrangement of ALeaflets BLeaves class 11 biology CBSE
Difference Between Prokaryotic Cells and Eukaryotic Cells
The symbiotic association of fungi and algae is called class 11 biology CBSE
Cell theory was formulated by A Schleiden and Schwann class 11 biology CBSE