


If \[{{r}_{1}}\] and \[{{r}_{2}}\] be the lengths of radii vectors of the parabola which are drawn at right angles to one another from the vertex, Prove that
\[{{r}_{1}}^{\dfrac{4}{3}}{{r}_{2}}^{\dfrac{4}{3}}=16{{a}^{2}}\left( {{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}} \right)\]
Answer
652.5k+ views
Hint: The coordinates of points where radius vector touches parabola, say $P$ and $Q$, can be obtained as \[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\] and \[\left( {{r}_{2}}\sin \theta ,-{{r}_{2}}\cos \theta \right)\]. Then, these can be substituted in the equation of parabola to form equations.
Complete step by step answer:
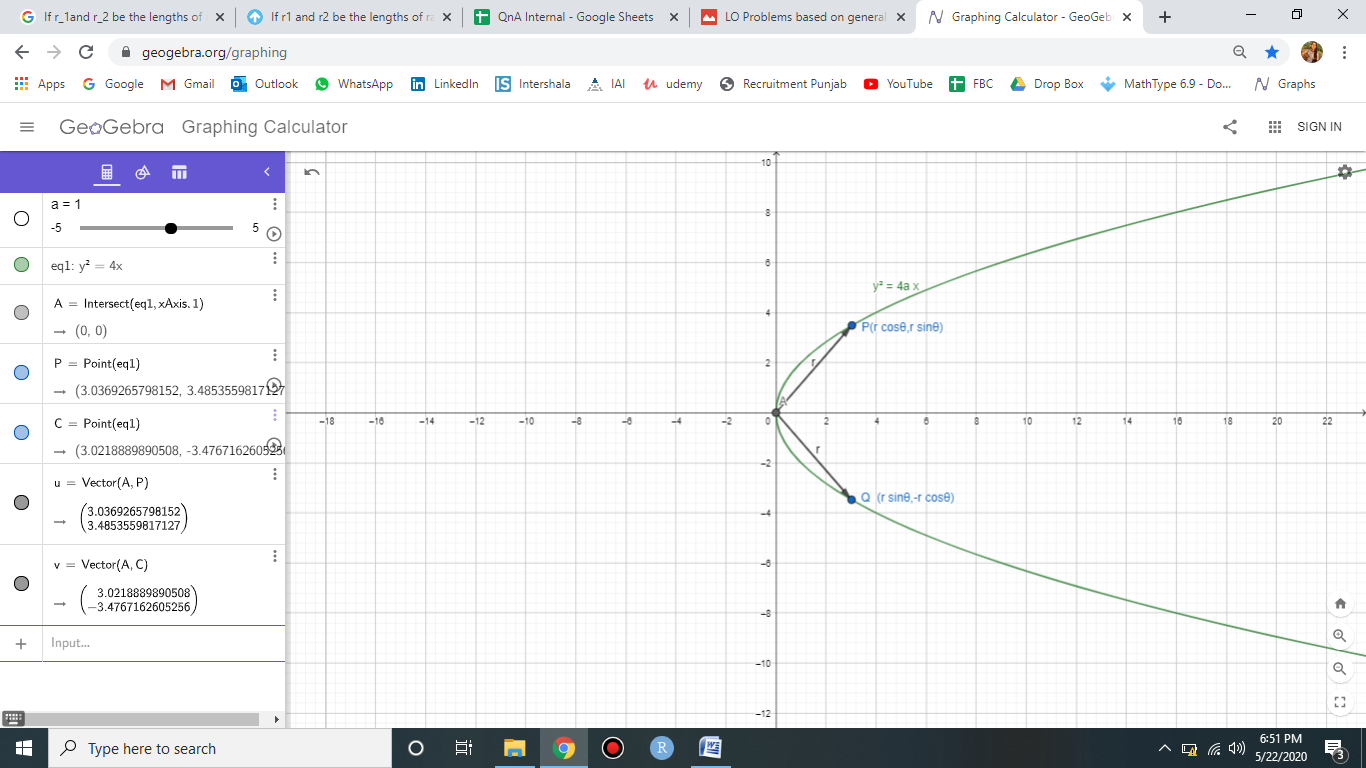
Let us consider a parabola of the form \[{{y}^{2}}=4ax\].
Since \[{{r}_{1}}\] is a radius vector, let us consider that it makes an angle $\theta $ with the positive direction of \[x-\]axis and touches the parabola at point $P$.
So we can obtain the coordinates of point $P$ as \[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\].
Now, it is said in the question that \[{{r}_{1}}\] and \[{{r}_{2}}\] are drawn at right angles to one another from the vertex. So, we can conclude that \[{{r}_{2}}\] makes an angle \[90-\theta \] with the positive direction of the \[x-\]axis and touches the parabola at point $Q$.
So we can obtain the coordinates of point $Q$ as \[\left( {{r}_{2}}\sin \theta ,-{{r}_{2}}\cos \theta \right)\].
Consider the figure as shown below.
Now, since $P$ and $Q$ lie on the parabola, they satisfy the equation of the parabola.
Therefore, we can substitute $P$\[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\] in the parabola \[{{y}^{2}}=4ax\] as shown below,
\[\begin{align}
& {{\left( {{r}_{1}}\sin \theta \right)}^{2}}=4a{{r}_{1}}\cos \theta \\
& {{r}_{1}}^{2}{{\sin }^{2}}\theta =4a{{r}_{1}}\cos \theta \\
& {{r}_{1}}{{\sin }^{2}}\theta =4a\cos \theta \ldots \ldots \ldots \left( i \right) \\
\end{align}\]
Now let us substitute the point $Q$\[\left( {{r}_{2}}\sin \theta ,-{{r}_{2}}\cos \theta \right)\]in the parabola \[{{y}^{2}}=4ax\] as shown below,
\[\begin{align}
& {{\left( -{{r}_{2}}\cos \theta \right)}^{2}}=4a{{r}_{2}}\sin \theta \\
& {{r}_{2}}^{2}{{\cos }^{2}}\theta =4a{{r}_{2}}\sin \theta \\
& {{r}_{2}}{{\cos }^{2}}\theta =4a\sin \theta \ldots \ldots \ldots \left( ii \right) \\
\end{align}\]
Let us divide equation \[\left( i \right)\] by \[\left( ii \right)\]
$\dfrac{{{r}_{1}}{{\sin }^{2}}\theta }{{{r}_{2}}{{\cos }^{2}}\theta }=\dfrac{4a\cos \theta }{4a\sin \theta }$
On cancelling the like terms, we get
$\dfrac{{{r}_{1}}{{\sin }^{2}}\theta }{{{r}_{2}}{{\cos }^{2}}\theta }=\dfrac{\cos \theta }{\sin \theta }$
On rearranging the terms, we get
$\dfrac{{{\sin }^{3}}\theta }{{{\cos }^{3}}\theta }=\dfrac{{{r}_{2}}}{{{r}_{1}}}$
Since we know that $\dfrac{\sin \theta }{\cos \theta }=\tan \theta $, we can write
$\begin{align}
& {{\tan }^{3}}\theta =\dfrac{{{r}_{2}}}{{{r}_{1}}} \\
& \tan \theta ={{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}} \\
\end{align}$
We can use the trigonometric relation \[\cos \theta =\dfrac{1}{\sqrt{1+{{\tan }^{2}}\theta }}\] and substitute the above result in it.
\[\begin{align}
& \cos \theta =\dfrac{1}{\sqrt{1+{{\left[ {{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}} \right]}^{2}}}} \\
& \cos \theta =\dfrac{1}{\sqrt{1+{{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{2}{3}}}}} \\
\end{align}\]
Taking the LCM, we get
\[\begin{align}
& \cos \theta =\dfrac{1}{\sqrt{\dfrac{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}{{{r}_{1}}^{\dfrac{2}{3}}}}} \\
& \cos \theta =\dfrac{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& \cos \theta =\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
\end{align}\]
We can also use the trigonometric relation \[\sin \theta =\tan \theta \times \cos \theta \] and substitute $\tan \theta ={{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}}$ and \[\cos \theta =\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}}\] in it. So, we will get
$\begin{align}
& \sin \theta ={{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}}\times \dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& \sin \theta =\dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{{{r}_{1}}^{\dfrac{1}{3}}}\times \dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& \sin \theta =\dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
\end{align}$
On substituting \[\cos \theta =\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}}\] and \[\sin \theta =\dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}}\] in equation \[\left( i \right)\], we get
\[\begin{align}
& {{r}_{1}}{{\left( \dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \right)}^{2}}=4a\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& {{r}_{1}}\dfrac{{{r}_{2}}^{\dfrac{2}{3}}}{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}=4a\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
\end{align}\]
On rearranging the terms, we get
\[\begin{align}
& {{r}_{1}}\dfrac{{{r}_{2}}^{\dfrac{2}{3}}}{{{r}_{1}}^{\dfrac{1}{3}}}=4a\dfrac{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& {{r}_{1}}^{\left( 1-\dfrac{1}{3} \right)}{{r}_{2}}^{\dfrac{2}{3}}=4a\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}} \\
& {{r}_{1}}^{\dfrac{2}{3}}{{r}_{2}}^{\dfrac{2}{3}}=4a\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}} \\
\end{align}\]
Squaring both sides, we get
\[\begin{align}
& {{\left( {{r}_{1}}^{\dfrac{2}{3}}{{r}_{2}}^{\dfrac{2}{3}} \right)}^{2}}={{\left[ 4a\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}} \right]}^{2}} \\
& {{r}_{1}}^{\dfrac{4}{3}}{{r}_{2}}^{\dfrac{4}{3}}=16{{a}^{2}}\left( {{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}} \right) \\
\end{align}\]
Therefore, we have proved that if \[{{r}_{1}}\] and \[{{r}_{2}}\] be the lengths of radii vectors of the parabola which are drawn at right angles to one another from the vertex, \[{{r}_{1}}^{\dfrac{4}{3}}{{r}_{2}}^{\dfrac{4}{3}}=16{{a}^{2}}\left( {{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}} \right)\].
Note: The choice of the parabola i.e. either \[{{y}^{2}}=4ax\] or \[{{x}^{2}}=4ay\] is important. Great attention must be paid as the points chosen will change accordingly. For the parabola, \[{{x}^{2}}=4ay\], the coordinates of points $P$ and $Q$ would be \[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\] and \[\left( -{{r}_{2}}\cos \theta ,{{r}_{2}}\sin \theta \right)\] respectively.
Complete step by step answer:
Let us consider a parabola of the form \[{{y}^{2}}=4ax\].
Since \[{{r}_{1}}\] is a radius vector, let us consider that it makes an angle $\theta $ with the positive direction of \[x-\]axis and touches the parabola at point $P$.
So we can obtain the coordinates of point $P$ as \[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\].
Now, it is said in the question that \[{{r}_{1}}\] and \[{{r}_{2}}\] are drawn at right angles to one another from the vertex. So, we can conclude that \[{{r}_{2}}\] makes an angle \[90-\theta \] with the positive direction of the \[x-\]axis and touches the parabola at point $Q$.
So we can obtain the coordinates of point $Q$ as \[\left( {{r}_{2}}\sin \theta ,-{{r}_{2}}\cos \theta \right)\].
Consider the figure as shown below.
Now, since $P$ and $Q$ lie on the parabola, they satisfy the equation of the parabola.
Therefore, we can substitute $P$\[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\] in the parabola \[{{y}^{2}}=4ax\] as shown below,
\[\begin{align}
& {{\left( {{r}_{1}}\sin \theta \right)}^{2}}=4a{{r}_{1}}\cos \theta \\
& {{r}_{1}}^{2}{{\sin }^{2}}\theta =4a{{r}_{1}}\cos \theta \\
& {{r}_{1}}{{\sin }^{2}}\theta =4a\cos \theta \ldots \ldots \ldots \left( i \right) \\
\end{align}\]
Now let us substitute the point $Q$\[\left( {{r}_{2}}\sin \theta ,-{{r}_{2}}\cos \theta \right)\]in the parabola \[{{y}^{2}}=4ax\] as shown below,
\[\begin{align}
& {{\left( -{{r}_{2}}\cos \theta \right)}^{2}}=4a{{r}_{2}}\sin \theta \\
& {{r}_{2}}^{2}{{\cos }^{2}}\theta =4a{{r}_{2}}\sin \theta \\
& {{r}_{2}}{{\cos }^{2}}\theta =4a\sin \theta \ldots \ldots \ldots \left( ii \right) \\
\end{align}\]
Let us divide equation \[\left( i \right)\] by \[\left( ii \right)\]
$\dfrac{{{r}_{1}}{{\sin }^{2}}\theta }{{{r}_{2}}{{\cos }^{2}}\theta }=\dfrac{4a\cos \theta }{4a\sin \theta }$
On cancelling the like terms, we get
$\dfrac{{{r}_{1}}{{\sin }^{2}}\theta }{{{r}_{2}}{{\cos }^{2}}\theta }=\dfrac{\cos \theta }{\sin \theta }$
On rearranging the terms, we get
$\dfrac{{{\sin }^{3}}\theta }{{{\cos }^{3}}\theta }=\dfrac{{{r}_{2}}}{{{r}_{1}}}$
Since we know that $\dfrac{\sin \theta }{\cos \theta }=\tan \theta $, we can write
$\begin{align}
& {{\tan }^{3}}\theta =\dfrac{{{r}_{2}}}{{{r}_{1}}} \\
& \tan \theta ={{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}} \\
\end{align}$
We can use the trigonometric relation \[\cos \theta =\dfrac{1}{\sqrt{1+{{\tan }^{2}}\theta }}\] and substitute the above result in it.
\[\begin{align}
& \cos \theta =\dfrac{1}{\sqrt{1+{{\left[ {{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}} \right]}^{2}}}} \\
& \cos \theta =\dfrac{1}{\sqrt{1+{{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{2}{3}}}}} \\
\end{align}\]
Taking the LCM, we get
\[\begin{align}
& \cos \theta =\dfrac{1}{\sqrt{\dfrac{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}{{{r}_{1}}^{\dfrac{2}{3}}}}} \\
& \cos \theta =\dfrac{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& \cos \theta =\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
\end{align}\]
We can also use the trigonometric relation \[\sin \theta =\tan \theta \times \cos \theta \] and substitute $\tan \theta ={{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}}$ and \[\cos \theta =\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}}\] in it. So, we will get
$\begin{align}
& \sin \theta ={{\left( \dfrac{{{r}_{2}}}{{{r}_{1}}} \right)}^{\dfrac{1}{3}}}\times \dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& \sin \theta =\dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{{{r}_{1}}^{\dfrac{1}{3}}}\times \dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& \sin \theta =\dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
\end{align}$
On substituting \[\cos \theta =\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}}\] and \[\sin \theta =\dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}}\] in equation \[\left( i \right)\], we get
\[\begin{align}
& {{r}_{1}}{{\left( \dfrac{{{r}_{2}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \right)}^{2}}=4a\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& {{r}_{1}}\dfrac{{{r}_{2}}^{\dfrac{2}{3}}}{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}=4a\dfrac{{{r}_{1}}^{\dfrac{1}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
\end{align}\]
On rearranging the terms, we get
\[\begin{align}
& {{r}_{1}}\dfrac{{{r}_{2}}^{\dfrac{2}{3}}}{{{r}_{1}}^{\dfrac{1}{3}}}=4a\dfrac{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}{\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}}} \\
& {{r}_{1}}^{\left( 1-\dfrac{1}{3} \right)}{{r}_{2}}^{\dfrac{2}{3}}=4a\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}} \\
& {{r}_{1}}^{\dfrac{2}{3}}{{r}_{2}}^{\dfrac{2}{3}}=4a\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}} \\
\end{align}\]
Squaring both sides, we get
\[\begin{align}
& {{\left( {{r}_{1}}^{\dfrac{2}{3}}{{r}_{2}}^{\dfrac{2}{3}} \right)}^{2}}={{\left[ 4a\sqrt{{{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}}} \right]}^{2}} \\
& {{r}_{1}}^{\dfrac{4}{3}}{{r}_{2}}^{\dfrac{4}{3}}=16{{a}^{2}}\left( {{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}} \right) \\
\end{align}\]
Therefore, we have proved that if \[{{r}_{1}}\] and \[{{r}_{2}}\] be the lengths of radii vectors of the parabola which are drawn at right angles to one another from the vertex, \[{{r}_{1}}^{\dfrac{4}{3}}{{r}_{2}}^{\dfrac{4}{3}}=16{{a}^{2}}\left( {{r}_{1}}^{\dfrac{2}{3}}+{{r}_{2}}^{\dfrac{2}{3}} \right)\].
Note: The choice of the parabola i.e. either \[{{y}^{2}}=4ax\] or \[{{x}^{2}}=4ay\] is important. Great attention must be paid as the points chosen will change accordingly. For the parabola, \[{{x}^{2}}=4ay\], the coordinates of points $P$ and $Q$ would be \[\left( {{r}_{1}}\cos \theta ,{{r}_{1}}\sin \theta \right)\] and \[\left( -{{r}_{2}}\cos \theta ,{{r}_{2}}\sin \theta \right)\] respectively.
Recently Updated Pages
Master Class 11 English: Engaging Questions & Answers for Success
Master Class 11 Social Science: Engaging Questions & Answers for Success
Master Class 11 Maths: Engaging Questions & Answers for Success
Master Class 11 Biology: Engaging Questions & Answers for Success
Master Class 11 Physics: Engaging Questions & Answers for Success
Master Class 11 Chemistry: Engaging Questions & Answers for Success
Trending doubts
One Metric ton is equal to kg A 10000 B 1000 C 100 class 11 physics CBSE
Difference Between Prokaryotic Cells and Eukaryotic Cells
Find the value of the expression given below sin 30circ class 11 maths CBSE
Difference between physical and chemical change class 11 chemistry CBSE
Two of the body parts which do not appear in MRI are class 11 biology CBSE
Draw a diagram of a plant cell and label at least eight class 11 biology CBSE