



Any point on the circumference of a rigid body which is rolling without slipping undergoes:
1.A circular path.
2.An elliptic path.
3.A cycloid path.
4.A parabolic path.
Answer
543.9k+ views
Hint: Rolling motion is a type of motion which combines rotational and translational motion together. We see rolling motion in each day of our lives for example moving wheels on an automobile along a highway, airplane wheels landing on the runway, etc.
Complete answer:
Step 1:
To understand rolling without slipping. In the case of rolling without slipping there is a linear (proportional) relation with velocity and acceleration at the centre of a mass of a wheel. Since, the motion is also rotational there would be a relation between linear velocity and acceleration with the angular acceleration and velocity. To better understand the relation, see the image below:
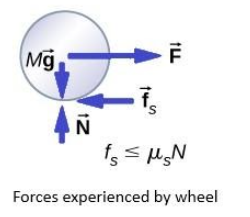
Here the force on the wheel is a linear force which is compensated by the frictional force, the natural weight of the ball (mg) which is applied on the ground is compensated by the Normal force (N) that the ground applies to the ball. The ball is at rest as all the forces cancel each other out.
Step 2: Find out the relation between the variables.
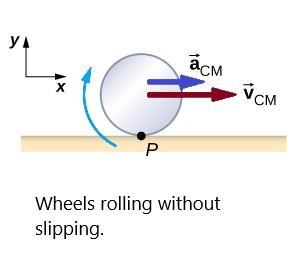
Here in the above diagram the wheel is rotating without slipping, so, there has to be a relation between the rotational motion and translational motion. It is given as:
$\omega $ = Angular Velocity
$v$= Linear Velocity
$R$= Radius
Similarly, Where:
$\alpha $= Angular Acceleration
= Linear Acceleration
$R$= Radius;
Since, the wheel has both the motions the total velocity of the wheel would be equal to the rotational velocity + Linear velocity.
${v_p} = - R\omega \widehat i + {v_{cm}}\widehat i$ … (The unit vector $\widehat i$ describes the direction in which the object is moving)
Since the ball is not slipping the velocity of the ball relative to the surface would be zero.
$0 = - R\omega \widehat i + {v_{cm}}\widehat i$
$ \Rightarrow R\omega = {v_{cm}}$
Now, we differentiate the L.H.S and R.H.S w.r.t time:
$\dfrac{{dR\omega }}{{dt}} = \dfrac{{d{v_{cm}}}}{{dt}}$
We know that the R is constant and acceleration is the rate of change of velocity w.r.t time $\dfrac{{d\omega }}{{dt}}$.
We can find out the relation between the angle and the distance covered:
${d_{cm}} = R\theta $
Option “3” is correct. Any point on the circumference of a rigid body which is rolling without slipping undergoes a cycloid path.
Note:
Here the answer seems to be circular path but it is not correct because a circular path is a helix motion meaning that the one component of the velocity is constant while in this case all the components of the velocity are changing that’s why it is a cycloid path.
Complete answer:
Step 1:
To understand rolling without slipping. In the case of rolling without slipping there is a linear (proportional) relation with velocity and acceleration at the centre of a mass of a wheel. Since, the motion is also rotational there would be a relation between linear velocity and acceleration with the angular acceleration and velocity. To better understand the relation, see the image below:
Here the force on the wheel is a linear force which is compensated by the frictional force, the natural weight of the ball (mg) which is applied on the ground is compensated by the Normal force (N) that the ground applies to the ball. The ball is at rest as all the forces cancel each other out.
Step 2: Find out the relation between the variables.
Here in the above diagram the wheel is rotating without slipping, so, there has to be a relation between the rotational motion and translational motion. It is given as:
$\omega $ = Angular Velocity
$v$= Linear Velocity
$R$= Radius
Similarly, Where:
$\alpha $= Angular Acceleration
= Linear Acceleration
$R$= Radius;
Since, the wheel has both the motions the total velocity of the wheel would be equal to the rotational velocity + Linear velocity.
${v_p} = - R\omega \widehat i + {v_{cm}}\widehat i$ … (The unit vector $\widehat i$ describes the direction in which the object is moving)
Since the ball is not slipping the velocity of the ball relative to the surface would be zero.
$0 = - R\omega \widehat i + {v_{cm}}\widehat i$
$ \Rightarrow R\omega = {v_{cm}}$
Now, we differentiate the L.H.S and R.H.S w.r.t time:
$\dfrac{{dR\omega }}{{dt}} = \dfrac{{d{v_{cm}}}}{{dt}}$
We know that the R is constant and acceleration is the rate of change of velocity w.r.t time $\dfrac{{d\omega }}{{dt}}$.
We can find out the relation between the angle and the distance covered:
${d_{cm}} = R\theta $
Option “3” is correct. Any point on the circumference of a rigid body which is rolling without slipping undergoes a cycloid path.
Note:
Here the answer seems to be circular path but it is not correct because a circular path is a helix motion meaning that the one component of the velocity is constant while in this case all the components of the velocity are changing that’s why it is a cycloid path.
Recently Updated Pages
Master Class 11 Computer Science: Engaging Questions & Answers for Success
Master Class 11 Business Studies: Engaging Questions & Answers for Success
Master Class 11 Economics: Engaging Questions & Answers for Success
Master Class 11 English: Engaging Questions & Answers for Success
Master Class 11 Maths: Engaging Questions & Answers for Success
Master Class 11 Biology: Engaging Questions & Answers for Success
Trending doubts
One Metric ton is equal to kg A 10000 B 1000 C 100 class 11 physics CBSE
There are 720 permutations of the digits 1 2 3 4 5 class 11 maths CBSE
Discuss the various forms of bacteria class 11 biology CBSE
Draw a diagram of a plant cell and label at least eight class 11 biology CBSE
State the laws of reflection of light
Explain zero factorial class 11 maths CBSE