



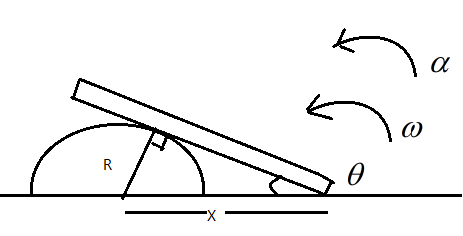
A rod leans against a stationary cylindrical body as shown in figure, and its right end slides to the right on the floor with a constant speed $v$. Choose the correct options:
\[\begin{align}
& A.\text{ the angular speed }\omega \text{=}\dfrac{-R{{v}^{2}}(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}} \\
& B.\text{ the angular acceleration }\alpha \text{=}\dfrac{Rv}{x\sqrt{{{x}^{2}}-{{R}^{2}}}} \\
& C.the\text{angular speed }\omega \text{=}\dfrac{Rv}{x\sqrt{{{x}^{2}}-{{R}^{2}}}} \\
& D.\text{the angular acceleration }\alpha \text{=}\dfrac{-R{{v}^{2}}(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}} \\
\end{align}\]
Answer
592.5k+ views
Hint: To begin with let us understand the definition of angular acceleration and angular velocity, first. These are often seen in bodies which undergo rotation.
We know that angular velocity $\omega$ is defined as the rate at which the angular position varies with respect to time, and also given as $\omega=\dfrac{v}{r}$ where $v$ is the linear velocity and $r$ is the from between the centre of the circle and the position of the body. Whereas, angular acceleration $\alpha$ is the change in angular velocity with respect to time.
Formula used:
$\omega=-\dfrac{d\theta}{dt}$ and$\alpha=\dfrac{d\omega}{dt}$
Complete step-by-step answer:
Let us assume that the radius of the cylindrical body is $R$, and that the rod makes an angle $\theta$ with the ground. Let the distance between the centre of the cylinder and the point where the rod touches the ground be $X$, and let the rod move with a linear velocity $v$, angular velocity $\omega$ and experience and angular acceleration $\alpha$ as shown in the figure.
Clearly, from the diagram we can say that $sin\theta=\dfrac{R}{X}$, rearranging, we get $X=\dfrac{R}{sin\theta}$
Then we know that linear velocity of rod $v$ can be expressed as $v=\dfrac{dx}{dt}.$
Then, we have $v=\dfrac{d}{dt}\left(\dfrac{R}{sin\theta}\right)=\dfrac{-Rcos\theta\left(\dfrac{d\theta}{dt}\right)}{sin^{2}\theta}$
But we know also know that angular acceleration$\omega$ is given as $\omega=-\dfrac{d\theta}{dt}$
Then substituting the value of $\omega$in $v$, we get,
$v=\dfrac{Rcos\theta \omega }{si{{n}^{2}}\theta }$
Rearranging, we get $\omega=\dfrac{vsin^{2}\theta}{Rcos\theta}$
From $sin^{2}\theta+cos^{2}\theta=1$, we can write $cos\theta=\sqrt{1-sin^{2}\theta}$
Replacing, we get, $\omega=\dfrac{vsin^{2}\theta}{R\sqrt{1-sin^{2}\theta}}$
Substituting for $sin\theta$ as $sin\theta=\dfrac{R}{X}$, we get, $\omega=\dfrac{v\left(\dfrac{R}{X}\right)^{2}}{R\sqrt{1-\left(\dfrac{R}{X}\right)^{2}}}=\dfrac{Rv}{x\sqrt{x^{2}-R^{2}}}$
Hence we get $\omega =\dfrac{Rv}{x\sqrt{{{x}^{2}}-{{R}^{2}}}}$
We also know that angular acceleration $\alpha$ is given as$\alpha=\dfrac{d\omega}{dt}$
Then differentiating $\omega$ with respect to $t$ we get, \[\alpha =\dfrac{-Rv\left[ \sqrt{{{x}^{2}}-{{R}^{2}}}+\dfrac{x.2x}{2\sqrt{{{x}^{2}}-{{R}^{2}}}} \right]}{{{\left( x\left( \sqrt{{{x}^{2}}-{{R}^{2}}} \right) \right)}^{2}}}=\dfrac{-Rv[{{x}^{2}}-{{R}^{2}}+{{x}^{2}}]}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}}=\dfrac{-Rv(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}}\]
Hence we get \[\alpha =\dfrac{-Rv(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}}\]
Thus the answer is
\[\begin{align}
& C.the \text{angular speed }\omega \text{=}\dfrac{Rv}{x\sqrt{{{x}^{2}}-{{R}^{2}}}} \\
& D.\text{the angular acceleration }\alpha \text{=}\dfrac{-R{{v}^{2}}(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}} \\
\end{align}\]
So, the correct answers are “Option C and D”.
Note: This question involves a lot of mathematical differentiation more than physics. You can remember the following equations for finding the derivatives, $\dfrac{d}{dt}\dfrac{u}{v}=\dfrac{vu\prime -uv\prime}{v^{2}}$, and $\dfrac{d}{dt}{uv}=vu\prime +uv\prime$ where $u\prime, v\prime$ are the first derivative of $u$, $v$ respectively.
We know that angular velocity $\omega$ is defined as the rate at which the angular position varies with respect to time, and also given as $\omega=\dfrac{v}{r}$ where $v$ is the linear velocity and $r$ is the from between the centre of the circle and the position of the body. Whereas, angular acceleration $\alpha$ is the change in angular velocity with respect to time.
Formula used:
$\omega=-\dfrac{d\theta}{dt}$ and$\alpha=\dfrac{d\omega}{dt}$
Complete step-by-step answer:
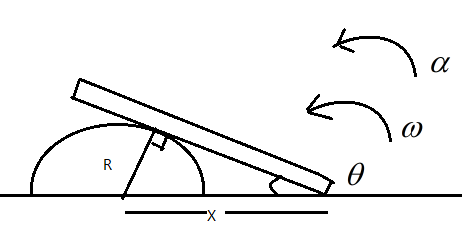
Let us assume that the radius of the cylindrical body is $R$, and that the rod makes an angle $\theta$ with the ground. Let the distance between the centre of the cylinder and the point where the rod touches the ground be $X$, and let the rod move with a linear velocity $v$, angular velocity $\omega$ and experience and angular acceleration $\alpha$ as shown in the figure.
Clearly, from the diagram we can say that $sin\theta=\dfrac{R}{X}$, rearranging, we get $X=\dfrac{R}{sin\theta}$
Then we know that linear velocity of rod $v$ can be expressed as $v=\dfrac{dx}{dt}.$
Then, we have $v=\dfrac{d}{dt}\left(\dfrac{R}{sin\theta}\right)=\dfrac{-Rcos\theta\left(\dfrac{d\theta}{dt}\right)}{sin^{2}\theta}$
But we know also know that angular acceleration$\omega$ is given as $\omega=-\dfrac{d\theta}{dt}$
Then substituting the value of $\omega$in $v$, we get,
$v=\dfrac{Rcos\theta \omega }{si{{n}^{2}}\theta }$
Rearranging, we get $\omega=\dfrac{vsin^{2}\theta}{Rcos\theta}$
From $sin^{2}\theta+cos^{2}\theta=1$, we can write $cos\theta=\sqrt{1-sin^{2}\theta}$
Replacing, we get, $\omega=\dfrac{vsin^{2}\theta}{R\sqrt{1-sin^{2}\theta}}$
Substituting for $sin\theta$ as $sin\theta=\dfrac{R}{X}$, we get, $\omega=\dfrac{v\left(\dfrac{R}{X}\right)^{2}}{R\sqrt{1-\left(\dfrac{R}{X}\right)^{2}}}=\dfrac{Rv}{x\sqrt{x^{2}-R^{2}}}$
Hence we get $\omega =\dfrac{Rv}{x\sqrt{{{x}^{2}}-{{R}^{2}}}}$
We also know that angular acceleration $\alpha$ is given as$\alpha=\dfrac{d\omega}{dt}$
Then differentiating $\omega$ with respect to $t$ we get, \[\alpha =\dfrac{-Rv\left[ \sqrt{{{x}^{2}}-{{R}^{2}}}+\dfrac{x.2x}{2\sqrt{{{x}^{2}}-{{R}^{2}}}} \right]}{{{\left( x\left( \sqrt{{{x}^{2}}-{{R}^{2}}} \right) \right)}^{2}}}=\dfrac{-Rv[{{x}^{2}}-{{R}^{2}}+{{x}^{2}}]}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}}=\dfrac{-Rv(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}}\]
Hence we get \[\alpha =\dfrac{-Rv(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}}\]
Thus the answer is
\[\begin{align}
& C.the \text{angular speed }\omega \text{=}\dfrac{Rv}{x\sqrt{{{x}^{2}}-{{R}^{2}}}} \\
& D.\text{the angular acceleration }\alpha \text{=}\dfrac{-R{{v}^{2}}(2{{x}^{2}}-{{R}^{2}})}{{{x}^{2}}{{({{x}^{2}}-{{R}^{2}})}^{\dfrac{3}{2}}}} \\
\end{align}\]
So, the correct answers are “Option C and D”.
Note: This question involves a lot of mathematical differentiation more than physics. You can remember the following equations for finding the derivatives, $\dfrac{d}{dt}\dfrac{u}{v}=\dfrac{vu\prime -uv\prime}{v^{2}}$, and $\dfrac{d}{dt}{uv}=vu\prime +uv\prime$ where $u\prime, v\prime$ are the first derivative of $u$, $v$ respectively.
Recently Updated Pages
Basicity of sulphurous acid and sulphuric acid are
Master Class 11 Business Studies: Engaging Questions & Answers for Success
Master Class 11 Computer Science: Engaging Questions & Answers for Success
Master Class 11 Economics: Engaging Questions & Answers for Success
Master Class 11 Social Science: Engaging Questions & Answers for Success
Master Class 11 English: Engaging Questions & Answers for Success
Trending doubts
One Metric ton is equal to kg A 10000 B 1000 C 100 class 11 physics CBSE
The largest wind power cluster is located in the state class 11 social science CBSE
Explain zero factorial class 11 maths CBSE
State and prove Bernoullis theorem class 11 physics CBSE
Which among the following are examples of coming together class 11 social science CBSE
Can anyone list 10 advantages and disadvantages of friction