


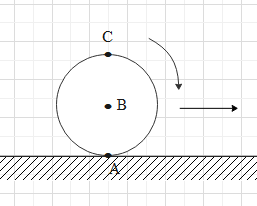
A sphere is rolling without slipping on a fixed horizontal plane surface. In the figure, A is the point of contact, B is the centre of the sphere and C is its topmost point. Then:
(This question has multiple correct options)
$\text{A}\text{. }\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}}=2\left( \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right)$
$\text{B}\text{. }\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{B}}}=\overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{A}}}$
$\text{C}\text{. }\left| \overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}} \right|=2\left| \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right|$
$\text{D}\text{. }\left| \overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}} \right|=4\left| \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right|$
Answer
595.8k+ views
Hint: In this case, the velocity of every will be due to the rotational motion and the translation motion of the sphere. Due to translation motion, each point will have a horizontal velocity v in the direction of x-axis. Due to the rotational motion, each point will have velocity given by $\overrightarrow{v}=\overrightarrow{r}\times \overrightarrow{\omega }$, where $\overrightarrow{r}$ is the position vector of the point from the centre of the sphere.
Formula used:
$\overrightarrow{v}=\overrightarrow{r}\times \overrightarrow{\omega }$
Complete answer:
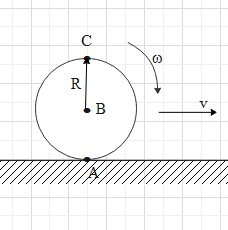
Suppose the sphere of radius R is rotating about its centre (i.e. point B) with an angular velocity $\omega $. The sphere is moving forward with velocity v (meaning it has a translation motion.)
It is given that the sphere is rolling without slipping on a fixed horizontal plane surface. The condition for rolling without slipping is that the net velocity of the point of the sphere that is in contact with the plane surface (in this case, it is point A) must be equal to zero.
This means that $\overrightarrow{{{V}_{A}}}=0$
In this case, the velocity of every will be due to the rotational motion and the translation motion of the sphere.
Due to translation motion, each point will have a horizontal velocity v in the direction of x-axis.
i.e. $v\widehat{i}$.
Due to the rotational motion, each pint will have velocity given by $\overrightarrow{v}=\overrightarrow{r}\times \overrightarrow{\omega }$, where $\overrightarrow{r}$ is the position vector of the point from the centre of the sphere.
Here, the direction of $\overrightarrow{\omega }$ is in the direction of $\widehat{k}$.
Therefore, $\overrightarrow{{{V}_{C}}}=v\widehat{i}+\left( \overrightarrow{{{r}_{C}}}\times \overrightarrow{\omega } \right)$.
$\Rightarrow \overrightarrow{{{V}_{C}}}=v\widehat{i}+{{r}_{C}}\omega \widehat{i}$
Here, ${{r}_{C}}=R$.
$\Rightarrow \overrightarrow{{{V}_{C}}}=v\widehat{i}+R\omega \widehat{i}=\left( v+R\omega \right)\widehat{i}$
And
$\overrightarrow{{{V}_{B}}}=v\widehat{i}+\left( \overrightarrow{{{r}_{A}}}\times \overrightarrow{\omega } \right)$.
But $\overrightarrow{{{r}_{A}}}=0$.
$\Rightarrow \overrightarrow{{{V}_{B}}}=v\widehat{i}+0=v\widehat{i}$.
Similarly, we get that $\Rightarrow \overrightarrow{{{V}_{A}}}=\left( v-R\omega \right)\widehat{i}$
But $\overrightarrow{{{V}_{A}}}=0$.
$\Rightarrow \left( v-R\omega \right)=0$
$\Rightarrow v=R\omega $.
Therefore,
$\Rightarrow \overrightarrow{{{V}_{C}}}=2v\widehat{i}$
Now if we check the options, then the correct equations are
$\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{B}}}=\overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{A}}}=v\widehat{i}$
And
$\left| \overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}} \right|=2\left| \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right|=2v$.
So, the correct answer is “Option B and C”.
Note:
Some students may write option A as the correct option. However, it is not.
$\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}}=2v\widehat{i}-0=2v\widehat{i}$
And
$2\left( \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right)=2\left( v\widehat{i}-2v\widehat{i} \right)=2\left( -v\widehat{i} \right)=-2v\widehat{i}$
Therefore,
$\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}}\ne 2\left( \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right)$.
Hence, option A is incorrect.
Formula used:
$\overrightarrow{v}=\overrightarrow{r}\times \overrightarrow{\omega }$
Complete answer:
Suppose the sphere of radius R is rotating about its centre (i.e. point B) with an angular velocity $\omega $. The sphere is moving forward with velocity v (meaning it has a translation motion.)
It is given that the sphere is rolling without slipping on a fixed horizontal plane surface. The condition for rolling without slipping is that the net velocity of the point of the sphere that is in contact with the plane surface (in this case, it is point A) must be equal to zero.
This means that $\overrightarrow{{{V}_{A}}}=0$
In this case, the velocity of every will be due to the rotational motion and the translation motion of the sphere.
Due to translation motion, each point will have a horizontal velocity v in the direction of x-axis.
i.e. $v\widehat{i}$.
Due to the rotational motion, each pint will have velocity given by $\overrightarrow{v}=\overrightarrow{r}\times \overrightarrow{\omega }$, where $\overrightarrow{r}$ is the position vector of the point from the centre of the sphere.
Here, the direction of $\overrightarrow{\omega }$ is in the direction of $\widehat{k}$.
Therefore, $\overrightarrow{{{V}_{C}}}=v\widehat{i}+\left( \overrightarrow{{{r}_{C}}}\times \overrightarrow{\omega } \right)$.
$\Rightarrow \overrightarrow{{{V}_{C}}}=v\widehat{i}+{{r}_{C}}\omega \widehat{i}$
Here, ${{r}_{C}}=R$.
$\Rightarrow \overrightarrow{{{V}_{C}}}=v\widehat{i}+R\omega \widehat{i}=\left( v+R\omega \right)\widehat{i}$
And
$\overrightarrow{{{V}_{B}}}=v\widehat{i}+\left( \overrightarrow{{{r}_{A}}}\times \overrightarrow{\omega } \right)$.
But $\overrightarrow{{{r}_{A}}}=0$.
$\Rightarrow \overrightarrow{{{V}_{B}}}=v\widehat{i}+0=v\widehat{i}$.
Similarly, we get that $\Rightarrow \overrightarrow{{{V}_{A}}}=\left( v-R\omega \right)\widehat{i}$
But $\overrightarrow{{{V}_{A}}}=0$.
$\Rightarrow \left( v-R\omega \right)=0$
$\Rightarrow v=R\omega $.
Therefore,
$\Rightarrow \overrightarrow{{{V}_{C}}}=2v\widehat{i}$
Now if we check the options, then the correct equations are
$\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{B}}}=\overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{A}}}=v\widehat{i}$
And
$\left| \overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}} \right|=2\left| \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right|=2v$.
So, the correct answer is “Option B and C”.
Note:
Some students may write option A as the correct option. However, it is not.
$\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}}=2v\widehat{i}-0=2v\widehat{i}$
And
$2\left( \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right)=2\left( v\widehat{i}-2v\widehat{i} \right)=2\left( -v\widehat{i} \right)=-2v\widehat{i}$
Therefore,
$\overrightarrow{{{V}_{C}}}-\overrightarrow{{{V}_{A}}}\ne 2\left( \overrightarrow{{{V}_{B}}}-\overrightarrow{{{V}_{C}}} \right)$.
Hence, option A is incorrect.
Recently Updated Pages
Master Class 11 Social Science: Engaging Questions & Answers for Success
Master Class 11 Physics: Engaging Questions & Answers for Success
Master Class 11 Maths: Engaging Questions & Answers for Success
Master Class 11 Economics: Engaging Questions & Answers for Success
Master Class 11 Computer Science: Engaging Questions & Answers for Success
Master Class 11 Chemistry: Engaging Questions & Answers for Success
Trending doubts
Discuss the various forms of bacteria class 11 biology CBSE
10 examples of friction in our daily life
What organs are located on the left side of your body class 11 biology CBSE
Draw a labelled diagram showing structure of LS of class 11 biology CBSE
How many rings are present in MEDTA+n class 11 chemistry CBSE
Draw the molecular orbital diagram of N2N2 + N2 Write class 11 chemistry CBSE